
热门标签
热门文章
- 1Xilinx DDR3 IP核使用问题汇总(持续更新)和感悟
- 2已解决Command “python setup.py egg_info“ failed with error code 1 in /tmp/pip-build-23ykqx51/pynacl/_创建egg项目报错code1
- 3循环神经网络(RNN)_rnn循环神经网络
- 4【头歌-Python】Python第九章作业(初级)第 1、2、4 关_附件中是某月每天的最高温度和最低温度数据,请绘制本月的高温曲线(红色、圆点标记
- 5Linux 中 Docker 启动服务时报错 driver failed programming external connectivity on endpoint: xxxx
- 6揭露通信培训套路—打着招聘旗号贷款培训的招转培,你中招了吗?_培训机构招聘套路
- 7OpenHarmony集成OCR三方库实现文字提取
- 8关于Vite打包项目后图片丢失的解决方法_打包的时候 svg图片不显示
- 9VUE学习中的一些JS知识点_vue charat
- 10elementui表单规则校验_elementui表单校验规则
当前位置: article > 正文
[深度学习]基于yolov8+bytetrack+pyqt5实现车辆进出流量统计+车辆实时测速实现
作者:AllinToyou | 2024-05-24 14:57:20
赞
踩
[深度学习]基于yolov8+bytetrack+pyqt5实现车辆进出流量统计+车辆实时测速实现
以前使用过yolov5+deepsort实现过车辆进出流量统计+车辆实时测速,可以看我往期视频,这回改成yolov8+bytetrack实现,实时性更好,原理和原来一样。车流量进出统计+车速测量优点:
- 使用目标检测算法考虑bbox抖动,解决了bbox抖动造成统计错误
- 分别采用流和视频分开统计时间,由于视频和流差异,造成视频统计不准确,因为视频按帧读取,并不是简单作时间差而是需要统计帧间隔数和fps进而推算出视频精确时间差。
- 流处理车辆速度计算公式:
车速=单位像素车速x像素偏移/(车辆当前位置时间-车辆进入时间)
时间为电脑本地时间或者在线北京时间
视频处理车速计算公式:
车速=单位像素车速x像素偏移/((当前帧索引-车辆进入帧索引)x(1/FPS))
【效果截图】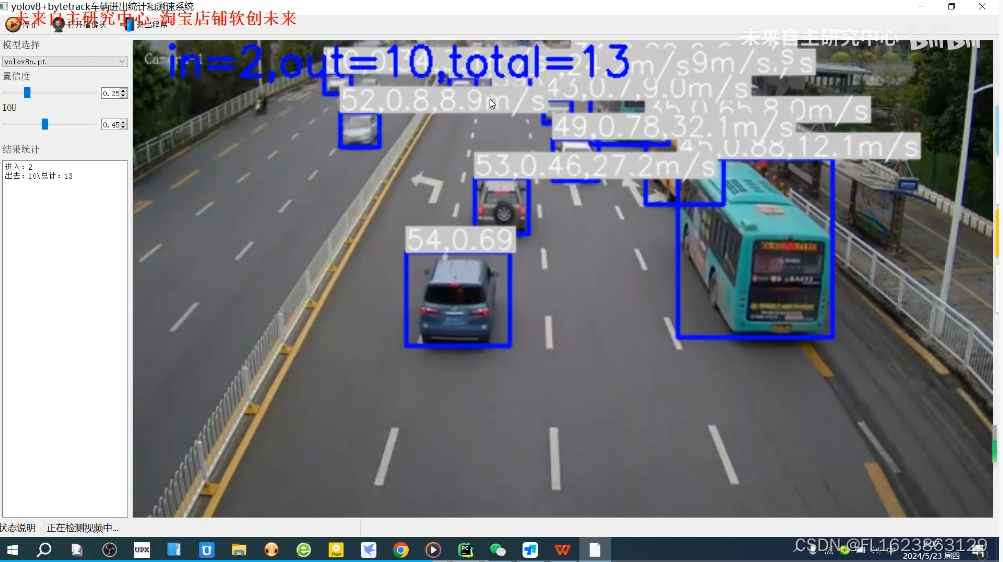
【视频演示】
【测试环境】
torch==1.9.0+cu111
torchvision==0.10.0+cu111
ultralytics==8.2.2
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/AllinToyou/article/detail/617910
推荐阅读
相关标签

