
热门标签
热门文章
- 1Mysql数据库sql语句_mysql打开数据库的sql语句
- 2NAND FLAASH基础_nand flash擦除最小单位
- 3torch.mean 或 x.mean
- 4微信小程序开发流程
- 5STM32(九)窗口看门狗-WWDG_wwdg_enableit();表示打开 中断。 (2分)
- 6gstreamer1.16安装_gstreamer安装
- 7华为配置路由式Proxy ARP示例
- 8uniapp引入uview报错 Error: Undefined variable. border-color: $u-border-color_使用uview-plus3.0 报 border-color: $u-border-color!im
- 9微机系统的存储器(一)半导体存储器_内存和外存都是由半导体器件构成的吗
- 10Python爬取影评并进行情感分析和数据可视化_textblob可视化
当前位置: article > 正文
SmallRobotArm机械臂开源项目代码分析_smallrobotarm源码解读
作者:Gausst松鼠会 | 2024-04-26 13:05:34
赞
踩
smallrobotarm源码解读
项目简介
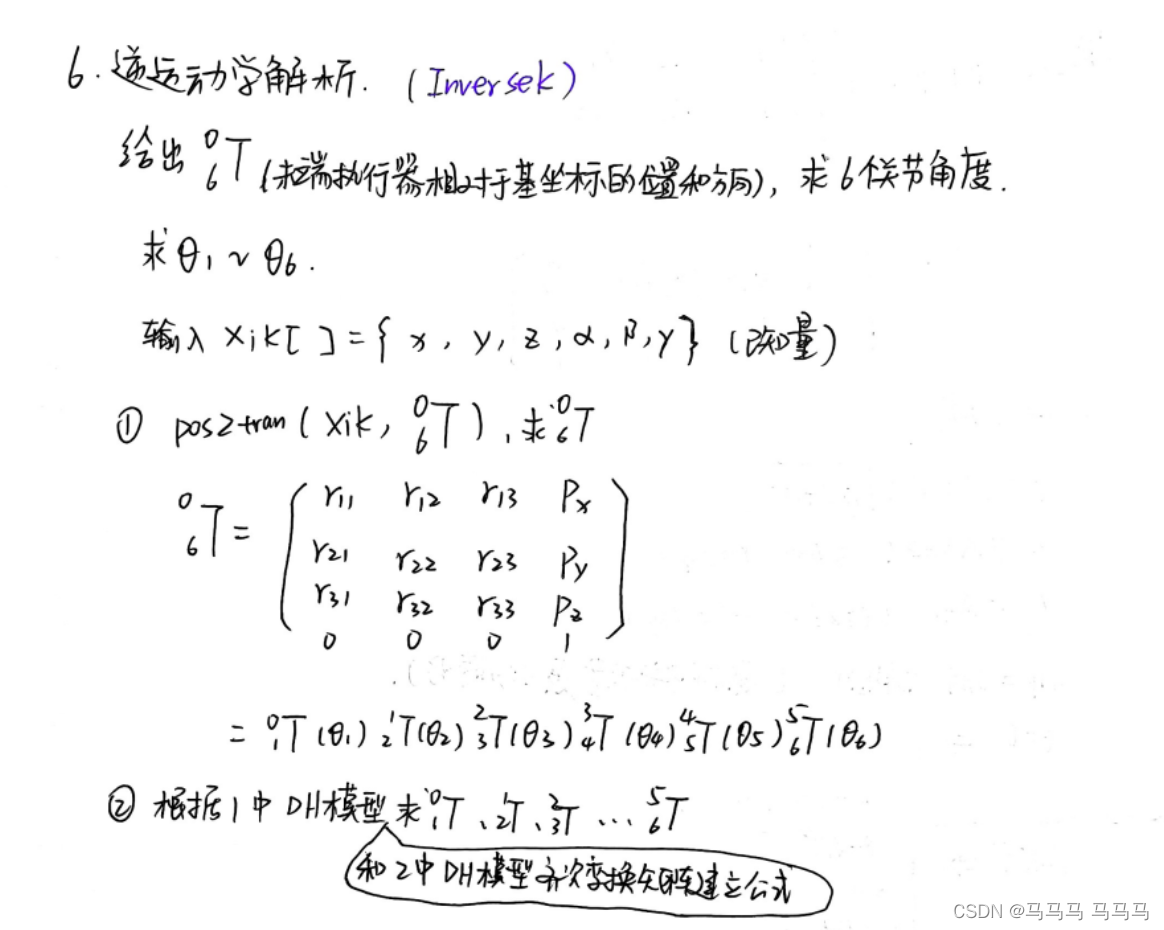
上学期学习机械臂时接触到一个开源项目Small Robot Arm,这是一个关于六轴机械臂的项目,六个关节采用步进电机进行驱动,主控板为Arduino Mega2560,代码只进行了运动学分析。

也可以从太极创客网站寻找资源,文件的分类比较清晰。
参考文章:
开源机器人SmallRobotArm机器人源码解读_人形机器人的开源代码-CSDN博客
代码分析
笔记只对项目中主要的函数进行了分析,这里没有手写正运动学分析的代码,这部分是比较简单的。





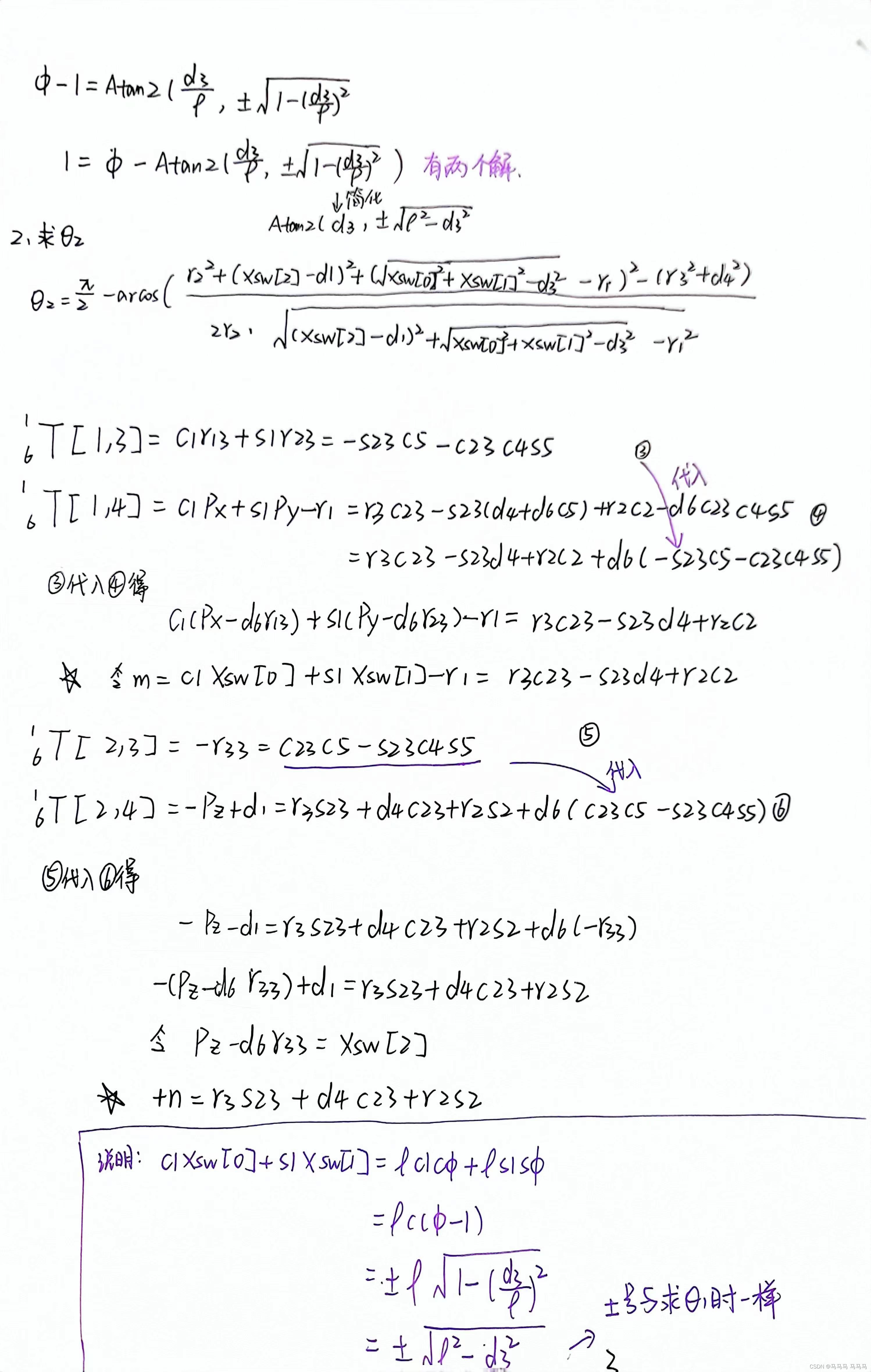

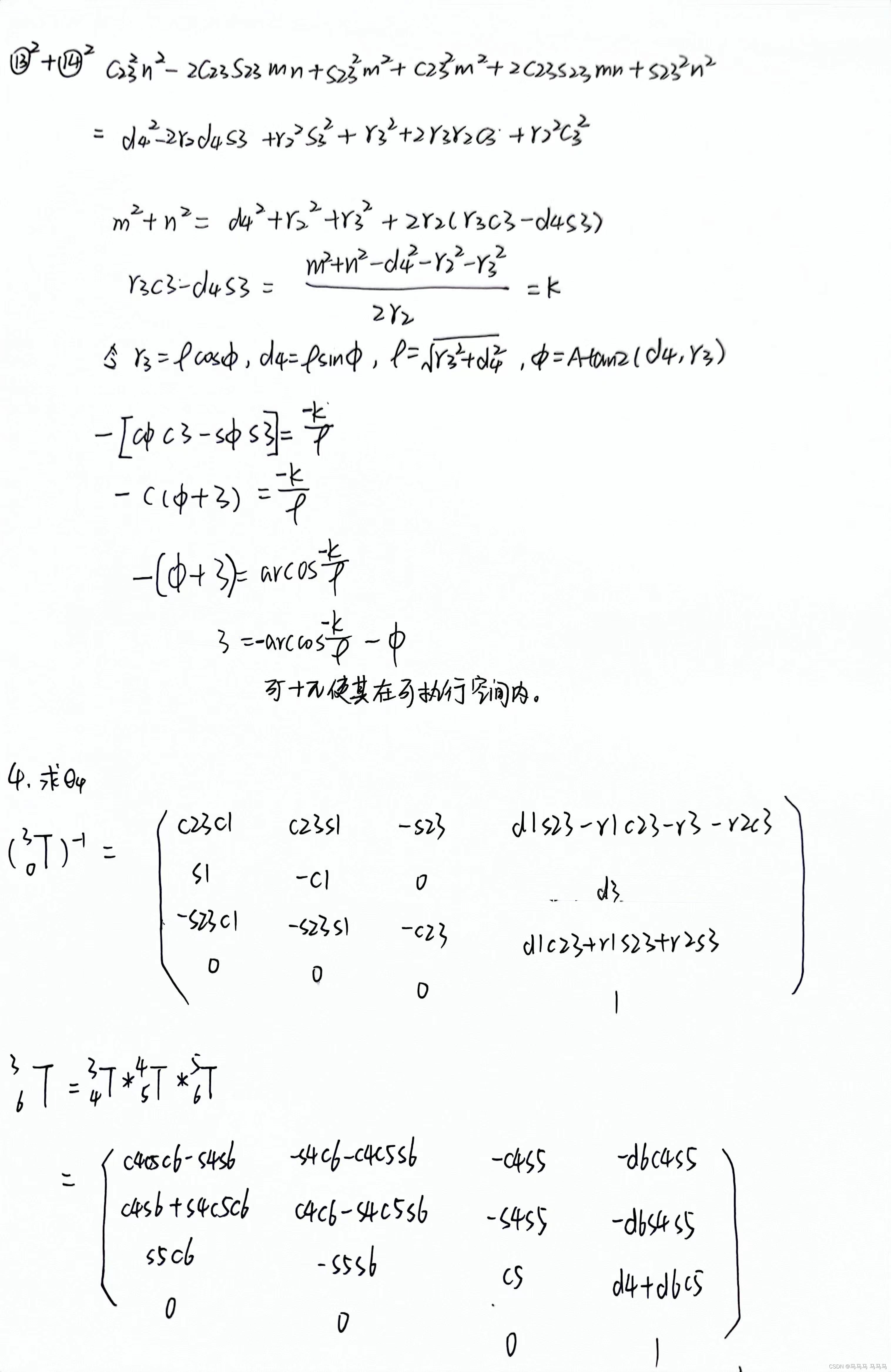



以上就是我对这个项目的理解,实践中也是根据这个项目进行改写的。通过matlab和实践的双重验证,运动学分析代码的准确率和可靠性非常高。如发现错误欢迎大家在评论区或私信指正,也欢迎大家一起交流学习机械臂内容。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Gausst松鼠会/article/detail/491119
推荐阅读
相关标签

