- 1Docker 部署 stirling-pdf 组件_stirling-tools/stirling-pdf[1]
- 2Mac | HomeBrew 安装 & 配置 MySQL
- 3[自然语言处理] 自然语言处理库spaCy使用指北_# 加载中文语言模型 nlp = spacy.load("zh_core_web_sm")
- 4数字普惠金融-工具变量数据集_广州市社会科学院 财政金融研究所刘松涛
- 5苹果宣布创立欧洲首个iOS开发中心
- 6【论文阅读·综述】Deep Learning for 3D Point Clouds: A Survey_flex-convolution论文中的第一个图表是什么意思
- 7windows环境下MySQL服务端和客户端安装,超详细_mysql客户端
- 8计算机科学与技术专业学什么--大三总结_计算机 大三学什么
- 9kubectl top命令报错:Metrics API not available_kubectl top node error: metrics api not available
- 10特征工程——交互特征(多项式特征)
PotatoPie 4.0 实验教程(24) —— FPGA实现摄像头图像中心差分变换
赞
踩
为什么要对图像进行中心差分变换?
对图像进行中心差分变换的主要目的是计算图像中每个像素点的梯度。梯度在图像处理中是一个非常重要的概念,它可以用来描述图像中灰度变化的快慢和方向,常用于边缘检测、特征提取和图像增强等任务中。
具体来说,中心差分变换有以下几个作用:
-
边缘检测:梯度可以帮助我们找到图像中的边缘,因为在边缘处像素的灰度值通常会发生较大的变化。通过计算梯度,我们可以找到这些变化较大的区域,从而实现边缘检测。
-
特征提取:梯度可以用来提取图像中的一些重要特征,例如角点和边缘点。这些特征在图像匹配和目标识别等任务中非常有用。
-
图像增强:梯度可以用来增强图像的对比度和细节。通过计算梯度,我们可以调整图像的灰度级,使得图像中的细节更加清晰。
-
图像去噪:梯度可以帮助我们去除图像中的噪声。由于噪声通常会导致像素值的随机变化,因此在梯度计算中可以将这些随机变化过滤掉,从而实现去噪效果。

综上所述,通过对图像进行中心差分变换,我们可以获得图像中每个像素点的梯度信息,从而实现边缘检测、特征提取、图像增强和图像去噪等各种图像处理任务。
图像中心差分变换的算法
中心差分图像的计算公式是通过当前像素的后一像素和前一像素的差值除以2来得到的。具体公式如下所示:
I(x) = (I(x+1) - I(x-1)) / 2
其中,I(x) 表示图像的像素值,x 表示当前像素的位置。I(x+1)表示后一像素值,I(x-1))表示前一像素值,这个公式描述了图像中每个像素的变化情况,可以用来分析图像的梯度或边缘信息。
中心差分图像的应用非常广泛,包括视频压缩、生物医学诊断、天文学、遥感、人脸识别等领域。
python实现图像的领域中心差分算法
PotatoPie 4.0 实验教程(24) —— FPGA实现摄像头图像中心差分变换-Anlogic-安路论坛-FPGA CPLD-ChipDebug
这段代码使用了 OpenCV 库和 NumPy 库来实现图像的中心差分变换。首先,它定义了一个 central_difference 函数,该函数接受一个灰度图像作为输入,并返回中心差分后的图像。然后,它读取了一张彩色图像,将其转换为灰度图像,并应用了中心差分算法。最后,它将原始图像、灰度图像和中心差分后的图像水平叠加,并添加了标题,最终显示出来。
matlab实现图像的领域中心差分算法
PotatoPie 4.0 实验教程(24) —— FPGA实现摄像头图像中心差分变换-Anlogic-安路论坛-FPGA CPLD-ChipDebug
这个 MATLAB 代码实现了对彩色图像应用中心差分算法,并将结果与原始彩色图像和灰度图像进行水平叠加,显示合并后的图像。下面是每个函数的功能说明:
-
img_central_diff: 主函数,用于读取彩色图像,将其转换为灰度图像,并应用中心差分算法。然后将原始彩色图像、灰度图像和差分图像水平叠加,并添加标题,最后显示合并后的图像。 -
central_difference: 辅助函数,接受一个灰度图像作为输入,并应用中心差分算法来计算每个像素的差分值。然后将结果取绝对值并转换为 uint8 类型,最后返回差分图像。
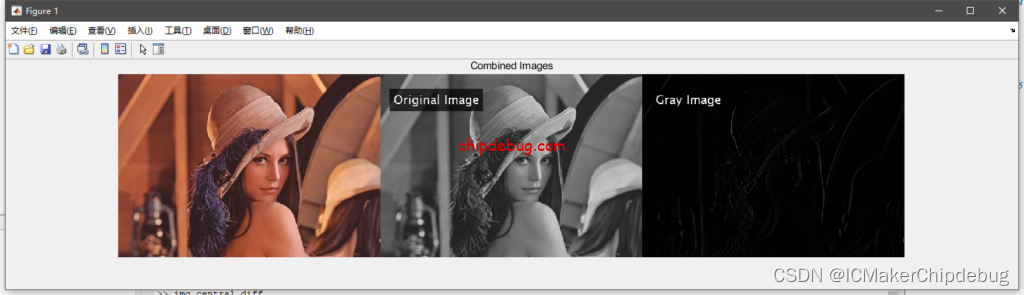
上面的代码可以看到合并后的灰度图太黑了,几乎看不到,要解决图像太黑的问题,可以考虑调整灰度图像和差分图像的亮度范围,使它们更接近彩色图像的亮度范围。这可以通过线性拉伸或直方图均衡化来实现。为了教程和简洁性在FPGA中我们不组合这些步骤。
下面是对代码的修改,其中使用了直方图均衡化来调整灰度图像和差分图像的亮度范围:
PotatoPie 4.0 实验教程(24) —— FPGA实现摄像头图像中心差分变换-Anlogic-安路论坛-FPGA CPLD-ChipDebug
调整后的图像如下

FPGA工程解析
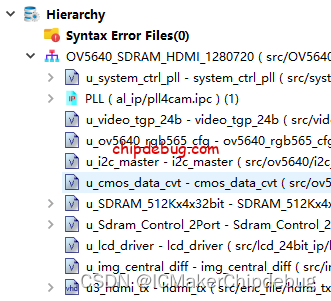
与demo18相比,只是多了一个img_central_diff的模块,也就是下面这一段代码,在从SDRAM读出来之后,经它处理后再输出hdmi_tx模块。
代码解析
核心算法就这一段,这一段代码中以红色分量为例i_r_d是前一周期的像素值,i_r为当前像素值,二者相减,然后右移一位即为除以2。
PotatoPie 4.0 实验教程(24) —— FPGA实现摄像头图像中心差分变换-Anlogic-安路论坛-FPGA CPLD-ChipDebug
其它请参考代码中的详细注释。
管脚约束
与PotatoPie 4.0 实验教程(18) —— FPGA实现OV5640摄像头采集以SDRAM作为显存进行HDMI输出显示相同,不作赘述。
时序约束
与PotatoPie 4.0 实验教程(18) —— FPGA实现OV5640摄像头采集以SDRAM作为显存进行HDMI输出显示相同,不作赘述。
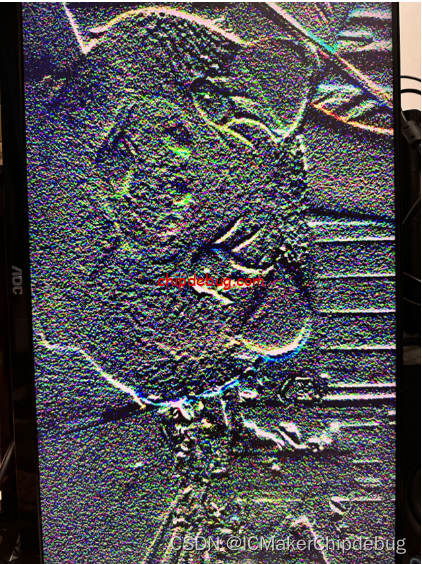
实验结果
像机噪点有点多呃。