
热门标签
热门文章
- 11-基于ArUco码的标记与检测
- 2C++函数参数的默认值_c++函数形参如果有默认值
- 3RabbitMQ优化消息阻塞系列(二)参数调优_rabbit:listener-container 参数
- 4哪个学校计算机每年招不满,这两所211大学,录取分数线低,却常年招不满生,适合考生捡漏...
- 5JsonObject判断是否为空_jsonobject判断为空
- 6java实现中文分词
- 7Git的rebase命令说明_linux git rebase
- 8HTML5期末大作业:甜品奶茶网站设计——甜品奶茶店(19页) HTML5网页设计成品_学生DW静态网页设计_web课程设计网页制作_奶茶网页设计
- 9C++刷题--选择题4_c++ 函数 只用一个默认值
- 10IT运维工程师职业发展与出路
当前位置: article > 正文
利用ArUco码实现相机位姿估计(Python)_aruco 位姿估计
作者:Gausst松鼠会 | 2024-05-22 19:10:04
赞
踩
aruco 位姿估计
环境:python3.7 opencv-contrib-python 4.5.1.48
一、相机标定
相机标定就是求相机的内参矩阵mtx和畸变系数dist
- 首先需要利用相机(你需要标定的)拍摄标定板照片,20张左右。拍摄照片的时候各个角度都拍一些,可以变换标定板的位置,但不要大幅度变换相机(不要翻转镜头,上下颠倒相机等等)。
拍摄的时候看一下照片的属性,这个分辨率需要和后边识别marker时的视频流分辨率保持一致,否侧会测距不准。(博主踩过的大坑这是)

- 我标定的时候把重投影误差大于0.3个像素的删除了,这样标定的比较准一些。
import numpy as np import cv2 import glob cap = cv2.VideoCapture(1) # 设置视频流的分辨率为 1280x720 cap.set(cv2.CAP_PROP_FRAME_WIDTH, 1280) cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 720) # 设置用于相机标定的迭代算法的终止条件 criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001) # 设置棋盘格的规格 chessboard_size = (11, 8) # 棋盘格内角点数目 # 初始化对象点和图像点列表 objpoints = [] # 3D points in real world space imgpoints = [] # 2D points in image plane. # 准备棋盘格对象点 objp = np.zeros((chessboard_size[0] * chessboard_size[1], 3), np.float32) objp[:, :2] = np.mgrid[0:chessboard_size[0], 0:chessboard_size[1]].T.reshape(-1, 2) # 遍历所有的图像文件路径 images = glob.glob('checkerboard1/*.jpg') # 遍历所有的图像文件路径 for fname in images: img = cv2.imread(fname) # 读取当前图像文件 gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 将当前图像转换为灰度图 # 查找棋盘格角点 ret, corners = cv2.findChessboardCorners(gray, chessboard_size, None) # 如果找到棋盘格角点 if ret: # 将棋盘格角点添加到imgpoints列表中 imgpoints.append(corners) # 添加相应的3D对象点 objpoints.append(objp) # 使用对象点和图像点进行相机标定,得到相机的内参矩阵、畸变系数以及旋转矩阵和平移矩阵 ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None) # 剔除重投影误差大于0.3的图像 new_objpoints = [] new_imgpoints = [] for i in range(len(objpoints)): imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist) error = cv2.norm(imgpoints[i], imgpoints2, cv2.NORM_L2) / len(imgpoints2) if error <= 0.3: new_objpoints.append(objpoints[i]) new_imgpoints.append(imgpoints[i]) # 使用剔除后的点重新进行相机标定 ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(new_objpoints, new_imgpoints, gray.shape[::-1], None, None) # 计算重投影误差 mean_error = 0 for i in range(len(new_objpoints)): imgpoints2, _ = cv2.projectPoints(new_objpoints[i], rvecs[i], tvecs[i], mtx, dist) error = cv2.norm(new_imgpoints[i], imgpoints2, cv2.NORM_L2) / len(imgpoints2) mean_error += error print("\剔除后相机内参:") print(mtx) print("\剔除后畸变系数") print(dist) # 输出重投影误差 print("\剔除后重投影", mean_error / len(new_objpoints))

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
3.输出结果
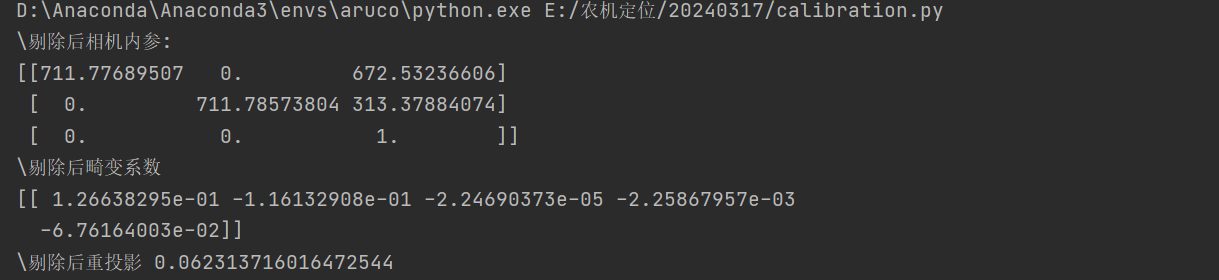
记住内参矩阵和畸变系数
二、计算相机位姿
1.导入库
import numpy as np
import cv2
import cv2.aruco as aruco
import math
- 1
- 2
- 3
- 4
2.捕捉视频流
设置视频流的分辨率(跟前边标定相机时拍摄照片的分辨率保持一致)
cap = cv2.VideoCapture(1)
# 设置视频流的分辨率为 1280x720
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 1280)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 720)
- 1
- 2
- 3
- 4
- 5
3.ArUco字典对象(我设置的是5*5)
aruco_dict = aruco.getPredefinedDictionary(aruco.DICT_5X5_100)
- 1
4.写计算位姿的函数
def estimate_pose(frame, mtx, dist): # 将图像转换为灰度图 gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) parameters = aruco.DetectorParameters_create() # 检测图像中的ArUco标记 corners, ids, rejectedImgPoints = aruco.detectMarkers(gray, aruco_dict, parameters=parameters, cameraMatrix=mtx, distCoeff=dist) font = cv2.FONT_HERSHEY_SIMPLEX # 如果检测到ArUco标记 if ids is not None and len(ids) > 0: for i in range(len(ids)): # 遍历每个检测到的ArUco标记 # 估计ArUco标记的姿态(旋转向量和平移向量) rvec, tvec, _ = aruco.estimatePoseSingleMarkers(corners[i], 0.10, mtx, dist) R, _ = cv2.Rodrigues(rvec) # 将旋转向量(rvec)转换为旋转矩阵(R)3*3 R_inv = np.transpose(R) # 旋转矩阵是正交矩阵,所以它的逆矩阵等于它的转置 R_inv 表示从相机坐标系到标记坐标系的旋转。 if tvec.shape != (3, 1): tvec_re = tvec.reshape(3, 1) #print('-------tvec_re------') #print(tvec_re) tvec_inv = -R_inv @ tvec_re tvec_inv1 = np.transpose(tvec_inv) pos = tvec_inv1[0] print(pos) distance = math.sqrt(pos[0]**2 + pos[1]**2 + pos[2]**2) rad = pos[0]/pos[2] angle_in_radians = math.atan(rad) angle_in_degrees = math.degrees(angle_in_radians) # 绘制ArUco标记的坐标轴 cv2.drawFrameAxes(frame, mtx, dist, rvec, tvec, 0.05) tvec_inv_str = " ".join([f"{num:.2f}m" for num in tvec_inv1.flatten()]) cv2.putText(frame, "tvec_inv: " + tvec_inv_str, (0, 80), font, 1, (0, 255, 0), 2, cv2.LINE_AA) cv2.putText(frame, 'distance:' + str(round(distance, 4)) + str('m'), (0, 110), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2, cv2.LINE_AA) cv2.putText(frame, "degree: " + str(angle_in_degrees), (0, 150), font, 1, (0, 0, 255), 2, cv2.LINE_AA) # 获取ArUco标记相对于相机坐标系的位置 # pos_str_cam = f"X: {tvec_inv1[0][0][0]:.2f}m, Y: {tvec_inv1[0][0][1]:.2f}m, Z: {tvec[0][0][2]:.2f}m" # 在图像上标注ArUco标记的相对于相机坐标系的位置信息 # cv2.putText(frame, pos_str_cam, (int(corners[i][0][0][0]), int(corners[i][0][0][1]) - 10), # font, 0.5, (0, 255, 0), 1, cv2.LINE_AA) # 在图像上绘制检测到的ArUco标记 aruco.drawDetectedMarkers(frame, corners) # 如果没有检测到ArUco标记,则在图像上显示"No Ids" else: cv2.putText(frame, "No Ids", (0, 64), font, 1, (0, 255, 0), 2, cv2.LINE_AA) return frame # 返回处理后的图像
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
注意:aruco.estimatePoseSingleMarkers()函数输出的rvec和tvec是marker的中点相对于相机坐标系的旋转向量和平移向量。而我们要求的是相机相对于marker坐标系的位姿。所以需要将rvec和tvec进行一下坐标系变换。如下:
R, _ = cv2.Rodrigues(rvec) # 将旋转向量(rvec)转换为旋转矩阵(R)3*3
R_inv = np.transpose(R) # 旋转矩阵是正交矩阵,所以它的逆矩阵等于它的转置 R_inv 表示从相机坐标系到标记坐标系的旋转。
if tvec.shape != (3, 1):
tvec_re = tvec.reshape(3, 1)
#print('-------tvec_re------')
#print(tvec_re)
tvec_inv = -R_inv @ tvec_re
tvec_inv1 = np.transpose(tvec_inv)
pos = tvec_inv1[0]
print(pos)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
while True: ret, frame = cap.read() if not ret: break mtx = np.array([ [711.77689507, 0, 672.53236606], [0, 711.78573804, 313.37884074], [0, 0, 1], ]) dist = np.array( [1.26638295e-01, -1.16132908e-01, -2.24690373e-05, -2.25867957e-03, -6.76164003e-02] ) # 调用estimate_pose函数对当前帧进行姿态估计和标记检测 frame = estimate_pose(frame, mtx, dist) new_width = 1280 new_height = 720 frame = cv2.resize(frame, (new_width, new_height)) cv2.imshow('frame', frame) # 等待按键输入,如果按下键盘上的'q'键则退出循环 if cv2.waitKey(1) & 0xFF == ord('q'): break # 释放VideoCapture对象 cap.release() cv2.destroyAllWindows()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
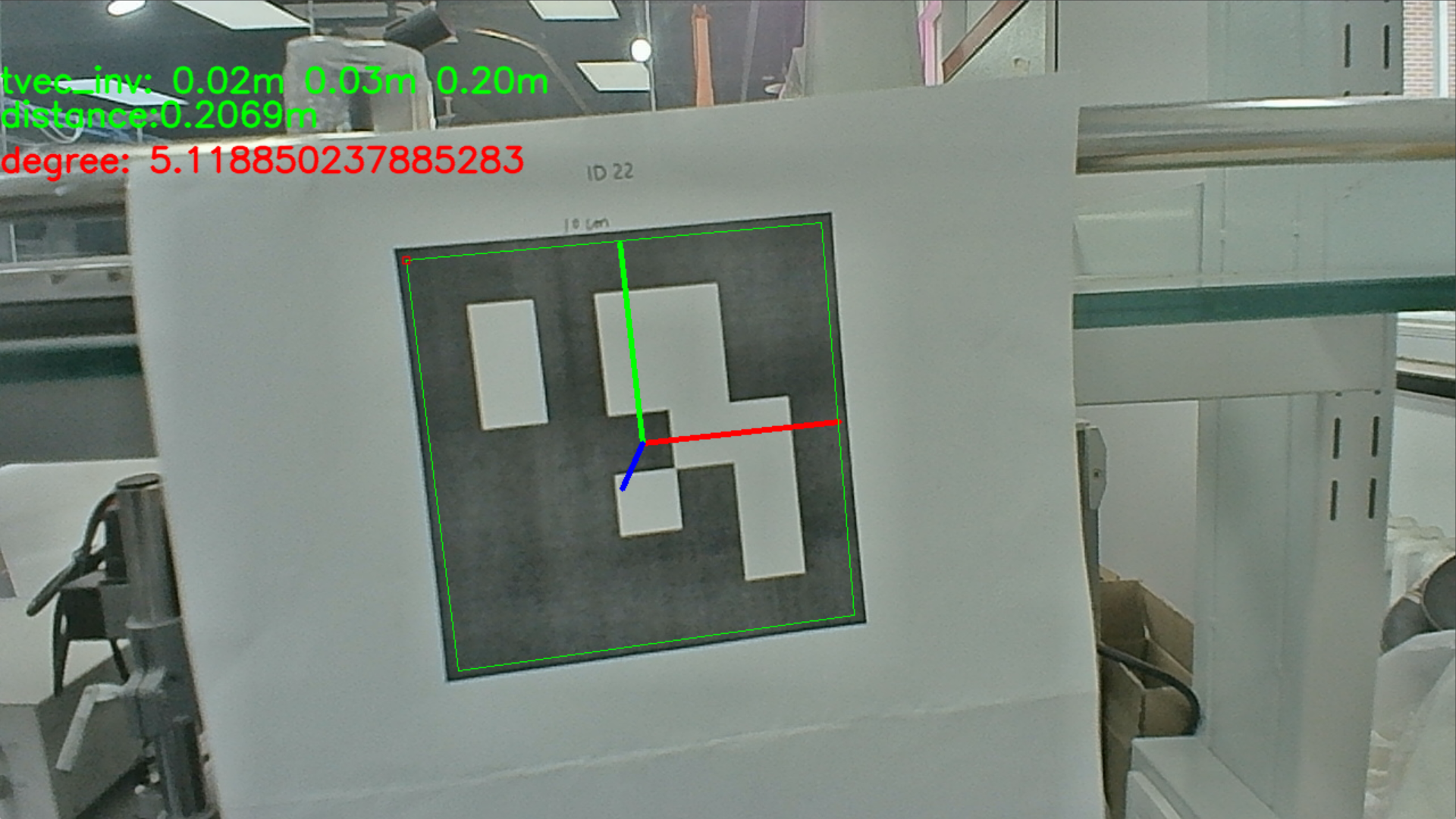
三、效果
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Gausst松鼠会/article/detail/609596
推荐阅读
相关标签

