
- 1【大厂AI课学习笔记】【2.2机器学习开发任务实例】(8)模型训练
- 2微服务学习 | Spring Cloud 中使用 Sentinel 实现服务限流_sentinel的client单机限流
- 3计算机视觉基础知识(十三)--推理和训练
- 4深度学习疆界:探索基本原理与算法,揭秘应用力量,展望未来发展与智能交互的新纪元
- 5python文本分类特征选择_文本分类特征选择方法
- 6Unity API - A_unity animation 的 add loop frame
- 7docker 获取Nvidia 镜像 | cuda |cudnn_docker获取nvidia镜像
- 8Prometheus监控K8S
- 9PCL ICP算法实现点云配准(C++详细过程版)_c++ pcl点云配准融合
- 105月书讯 | 《这就是ChatGPT》来了!
基于英特尔开发套件使用ORB-SLAM3实现无人机实时定位_orb-slam3在tum数据集上的精度
赞
踩
作者:上海大风技术有限公司 余力
1. 大风无人机简介
大风无人机是上海大风技术有限公司自主研发的桥梁巡检无人机,旨在为客户提供:
- 一站式的无人机桥检解决方案,克服无GPS信号时的无人机定位精度问题
- 高分辨率且准确的桥梁与城市建模
目前大风无人机已为多位客户提供高分辨率模型,包括桥梁、建筑物、道路等,为无人机在工业细分领域的应用提供优质方案。


图1.大风无人机
(左:飞行中的无人机;右:机载AIxBoard)
2. 双目视觉与IMU融合SLAM技术简介
工业建模对于精度有着高要求,这意味着无人机的SLAM算法要提供可靠的实时位姿估计。ORB-SLAM3是目前融合双目视觉与IMU的优秀算法,其前端是针对实时性优化的ORB描述子与关键帧的提取算法,后端是局部地图的维护、闭环矫正与全局地图的更新。在TUM数据集测试中,其最高精度可达1cm。我司基于该框架研发算法,实现双目视觉与IMU数据的融合,精准计算位移距离并给出可靠的实时位姿,使得无人机在无GPS的情况下进行实时定位成为可能,并能被应用于各种无GPS场景下的自主飞行与建模。
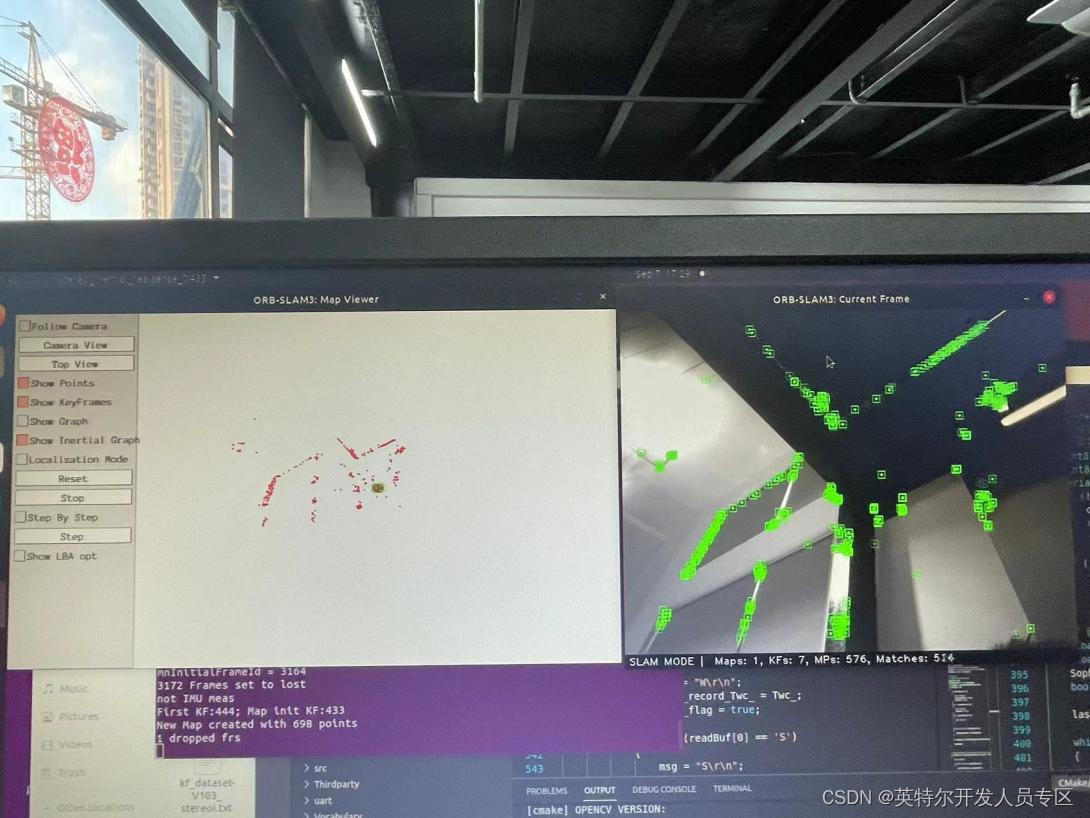

图2.SLAM算法运行效果图
(左:特征点提取图;右:地图点与双目相机位姿)
ORB-SLAM3在上一代的基础上优化了以下方面:
- 融合视觉信息和IMU数据,提高了位姿估计的稳定性与精度
- 对闭环检测增加了关键帧时序连续性要求,保证了闭环的精度
- 设置了活跃与非活跃地图,支持多地图的建立与融合
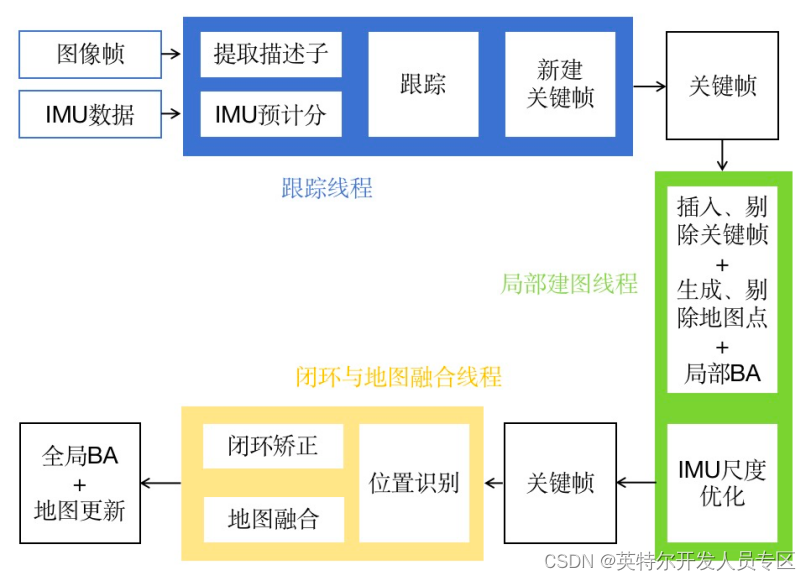
图3.SLAM算法框架图
3. 使用英特尔CPU作为机载算力核心的优势
大风无人机使用英特尔CPU作为机载算力核心,是因为x86+Linux的软件生态非常强大,支持多种市场上已有的软件和硬件组件,易于快速构建软件系统,提升开发效率,同时还有强大的可扩展性和可维护性。
本文将介绍在英特尔CPU下运行SLAM算法的结果。
4. SLAM算法运行平台
机载电脑硬件:英特尔开发套件

机载电脑系统:
Ubuntu20.04.1
传感器:RealSense D435i
5. SLAM算法运行结果
在无人机巡检建模中,SLAM算法需要提供可靠的位姿估计以知晓机体的位移和在地图中的位置,这需要跟踪线程尽可能快地处理传感器数据,即消息帧的处理频率要尽可能高。在本次测试中,我们在AIxBoard上运行了SLAM算法,在双目相机以约30 Hz的频率拍摄的情况下,追踪线程的平均处理速度能达到29.69 Hz,说明可以程序可以稳定地处理所有到来的双目图像。
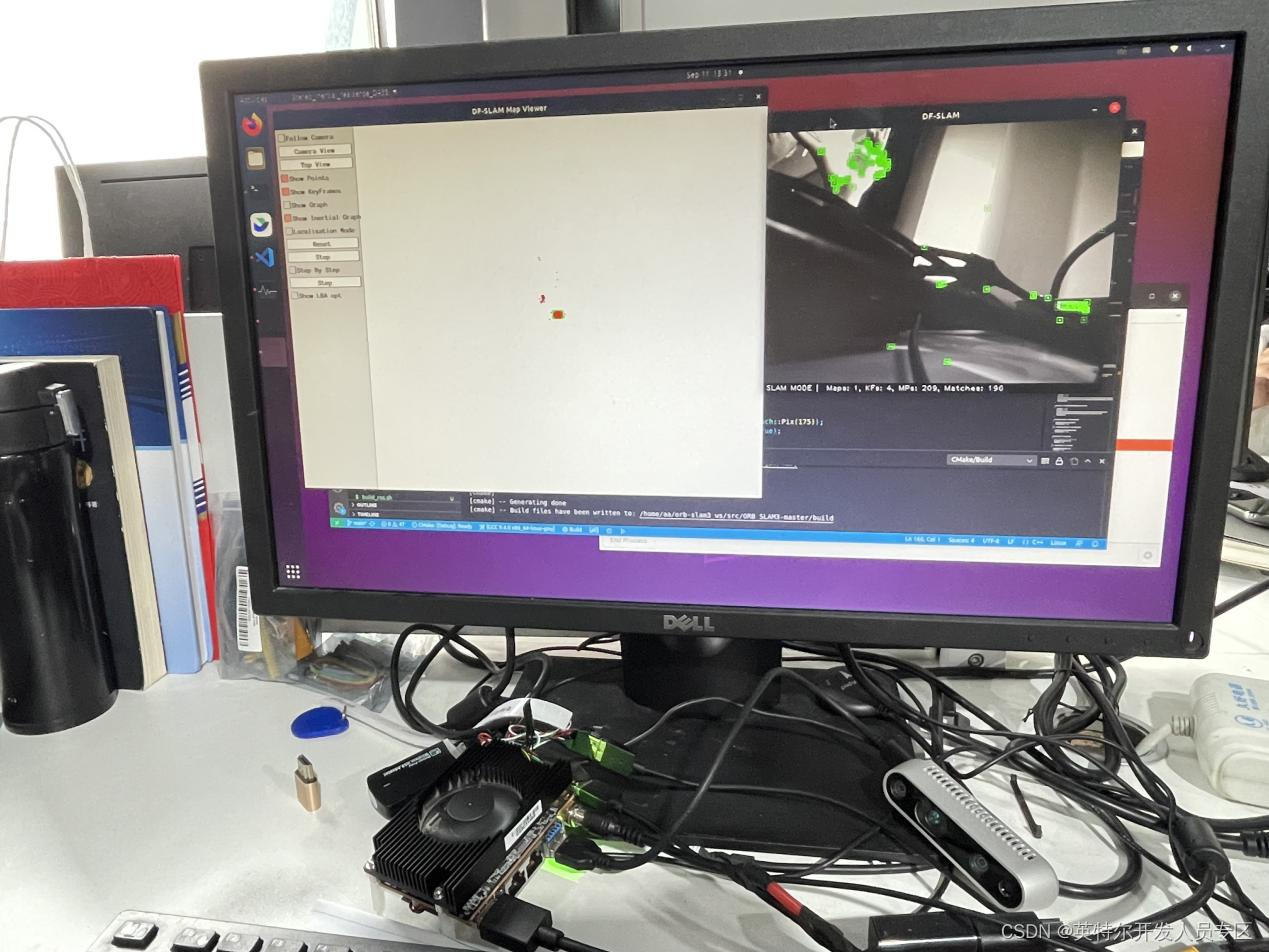
图4.SLAM程序的执行效果
基于英特尔开发套件用ORB-SLAM3实现无人机实时定位
6. 总结与展望
我们在英特尔开发套件下使用双目视觉与IMU融合的SLAM算法,使无人机具备输出可靠位姿并准确移动规定距离的能力,为后续建立高分辨率与高精度模型提供可靠数据。
未来,大风无人机将支持更高性能的英特尔CPU,实现在无GPS信号的场景中自主执行任务的目标。
公司简介:
上海大风技术有限公司成立于2019年。致力于成为领先的无人机智能应用专家,专注于无人机在全新领域的探索与创新。
凭借自主研发的软硬件产品,为交通、物流、电力、建筑、应急、消防等行业提供革命性的整体解决方案。成立至今已取得各种发明专利、软件著作权20余项。

