
热门标签
热门文章
- 1vue -- 无法打卡vue ui创建项目_deprecate request@^2.67.0 request has been depreca
- 2react 遍历生产form表单(FormItem)_react 循环form.item
- 3build opencv3.3.0 with VTK8.0, CUDA9.0 on ubuntu9.0
- 4java正则表达式校验日期_java验证出生日期正则表达式
- 501_C++ Qt开发:Qt的安装与配置
- 6C# 使用EPPlus创建Excel文件_c# epplus excel
- 7linux多进程通信框架,Linux下多进程IPC通讯的例子
- 8Unity摄像机详解_unity 摄像机 后视镜开发
- 9DOM编程-表单验证_html dom表单验证
- 10Sora给中国AI带来的真实变化
当前位置: article > 正文
Unity 模拟手指关节运动,控制手指握拳,展开,逆向动力学_unity 手关节旋转
作者:不正经 | 2024-02-22 01:41:27
赞
踩
unity 手关节旋转
Unity 逆向动力学关节运动
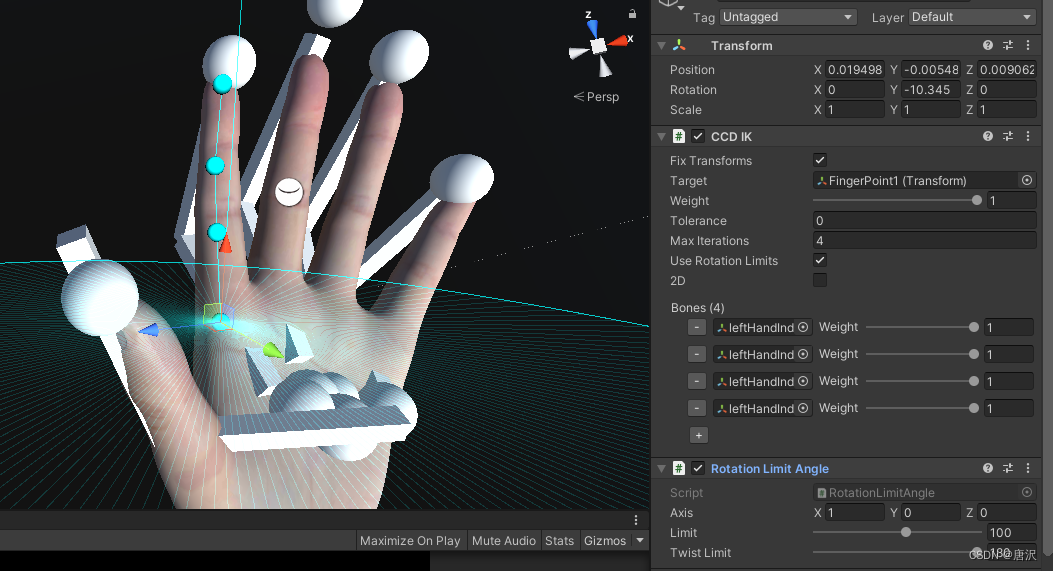
效果:
分析:
关键技术就是逆向动力学,如何控制"一个点"带动其他关节运动,类似于Unity内置的铰链关节Joint.
不过我们暂时不考虑使用铰链关节,里面的限制比较多,不确定性太强.有两个插件推荐
- 1 Final IK 下载链接: Unity官方下载地址
- 2 Bio IK 下载链接: Unity官方下载地址
这里用Final IK的CCD IK或者用Finger Rig
控制弯曲路径用之前写过的仪表盘指针位置:Unity 仪表盘制作 自定义表盘的开始结束点 自动匹配指针位置
我们调整好每根手指的路径,关节目标点设定好就可以模拟手部动作
总结:
本篇没有什么大的技术,都是之前用过,或者别的功能拼成的效果,中间只是加了一点辅助代码
Demo下载连接:Demo下载
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/不正经/article/detail/128004
推荐阅读
相关标签

