
热门标签
热门文章
- 1Postman完全卸载步骤_postman卸载
- 2Object.defineProperty()详解_object.definepropert()
- 3基于web的医院预约系统的设计与实现(JavaSSM)_网上预约挂号系统国内外科研调查情况
- 4解决yum安装dkms报错No match for argument: dkms Error: Unable to find a match: dkms
- 5智能手机之硬件开发知识篇一_硬件开发手机
- 6游戏Loading中的小提示和Loading动画实现
- 7react项目结构以及jsx模板语法_react模板语法
- 8MATLAB图像处理之图像读取_matlab读取图片
- 9python学习7:(模块创建及import指令运用)python标准模块 —— random随机数、time时间模块_import random # 引入生成随机数的模块 import time a = random.
- 10智能分析网关V4+EasyCVR视频融合平台——高速公路交通情况的实时监控和分析一体化方案_高速公路云实时监控
当前位置: article > 正文
KUKA机器人坐标点如何赋值?_埃斯顿机器人如何对点位进行点位赋值
作者:凡人多烦事01 | 2024-02-22 04:35:02
赞
踩
埃斯顿机器人如何对点位进行点位赋值
KUKA机器人坐标点如何赋值?

KUKA机器人系统中如何实现将某个点位整体赋值给另一个点位呢?
| 具体的方法可参考以下内容: |
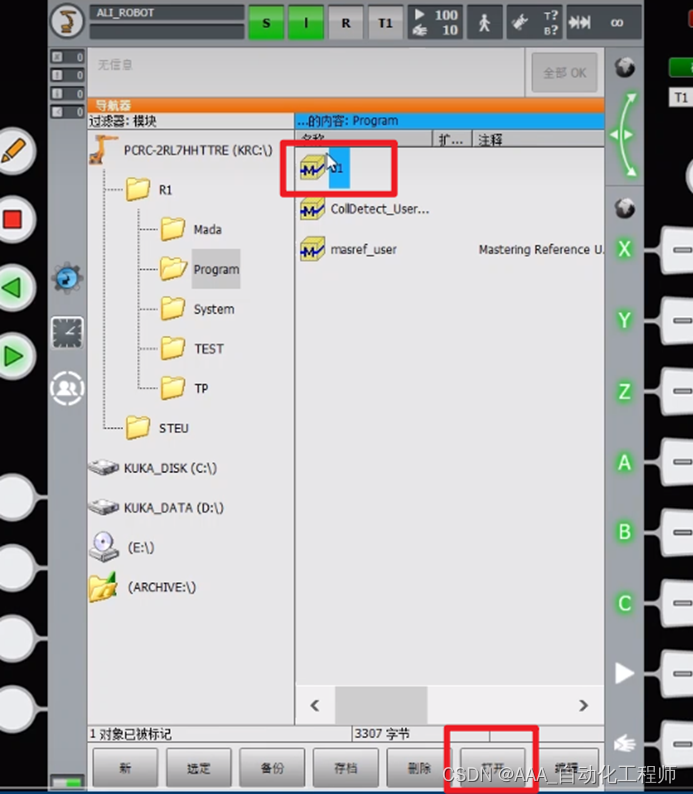
如下图所示,选中某个程序,然后点击下方的打开,
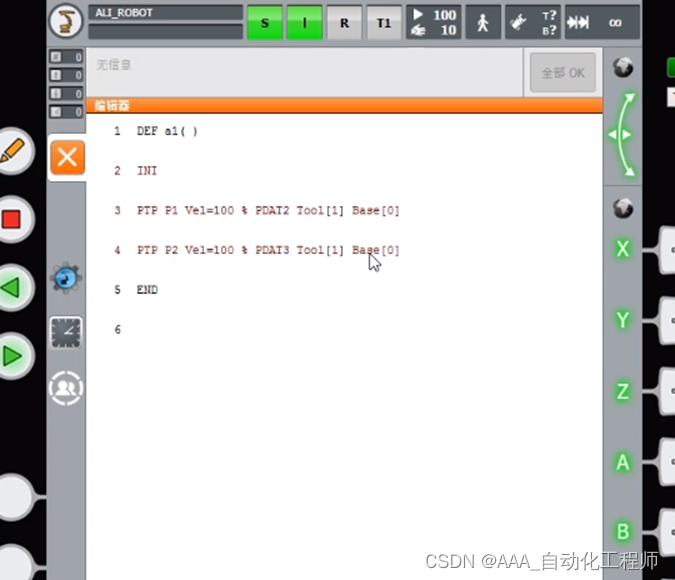
如下图所示,进入程序后,这里有P1和P2两个点位,如果要实现让P2的点位和P1的点位完全相同,除了通过示教器示教的方法,这里再和大家分享直接赋值的方法,
如下图所示,在P1和P2之间,编写语句xp2=xp1,即可实现将P1的坐标点整体赋值给P2,
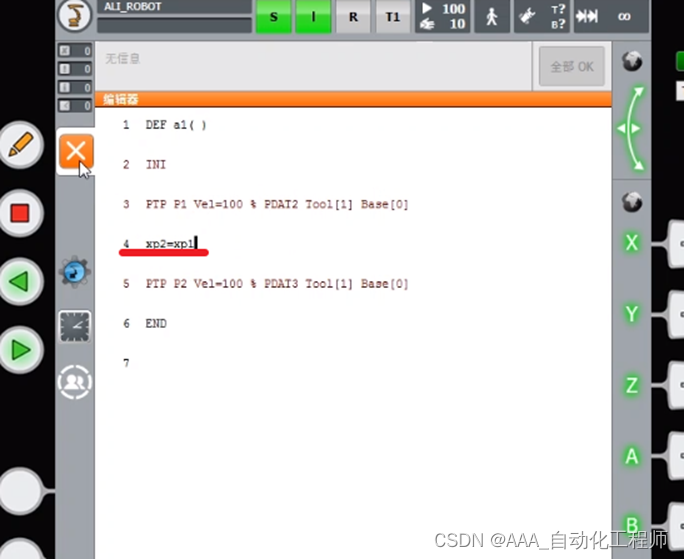
编写完成后,点击左上角的叉号,系统提示是否保存,确认无误的话点击是,
推荐阅读

相关标签

