
热门标签
热门文章
- 1zabbix3.2 Discovery 自动化监控磁盘IO_zabbix 差量每秒速率 差量简单变化
- 22024年美国大学生数学建模竞赛A题中英版_鉴于七鳃鳗性别比例的变化,对生态系统的稳定性有什么影响?
- 3创建AD域_ad域的搭建与管理
- 4python 爬虫视频网站_python爬取vip视频
- 5docker基础(4):安装常用软件_docker必装软件
- 6ABBYY FineReader PDF2022新版新增功能介绍
- 7精心整理|Python爱好者社区历史文章合集(作者篇)--20190925从豆瓣获取_数据城堡参赛代码实战篇
- 8最佳实践系列丨Docker EE 大规模部署指南(一)
- 9【Vue3】学习watch监视:深入了解Vue3响应式系统的核心功能(下)
- 10【Linux】Linux 常用基操和 Java 环境的部署_1)在/home目录下建立文件test.txt,将文件test.txt拷贝到/dve 这个目录下,并
当前位置: article > 正文
1、一个简单的 ROS web 人机建图页面开发_ros web界面
作者:小蓝xlanll | 2024-02-18 12:03:41
赞
踩
ros web界面
文章参考:
制作简单的ROSWEB (2) -使用rosjs 进行栅格地图web端3d可视化_ros web_KaHoWong的博客-CSDN博客
代码下载:参考了博主的一些代码,并进行了一定的修改
下载地址:ROS WEB开发: ROS 仿真/实体 机器人 web端人机交互界面开发 - Gitee.com
1、运行环境:
ROS机器人端(linux仿真ROS系统、实体机器人ROS系统)
浏览器端(同一网段下某台电脑)
目前,文章使用的ROS 机器人端为虚拟机端仿真,使用古月mbot机器人,源码下载地址为:ROS WEB开发: ROS 仿真/实体 机器人 web端人机交互界面开发 - Gitee.com


将 catkin_ws.zip 进行解压后,获取仿真机器人文件,放入ubuntu 系统下catkin_ws/src目录下。
2、ROS机器人端配置:
2.1 配置rosbridge
根据ros版本,配置rosbridge:
sudo apt-get install ros-<ROS系统版本:如:kinetic、melodic>-rosbridge-suite2.2 启动仿真机器人
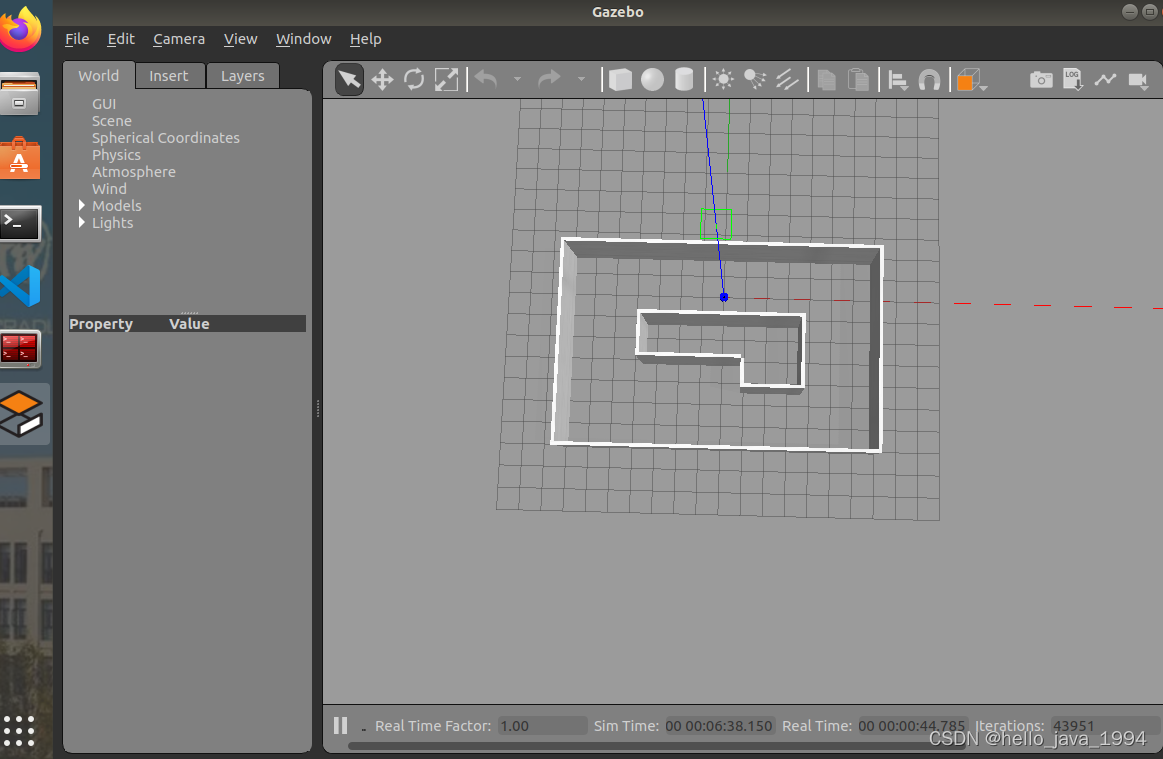
启动仿真机器人,这里使用古月mbot机器人:
- roscore
- roslaunch mbot_gazebo mbot_laser_nav_gazebo.launch
- roslaunch mbot_navigation gmapping_demo.launch
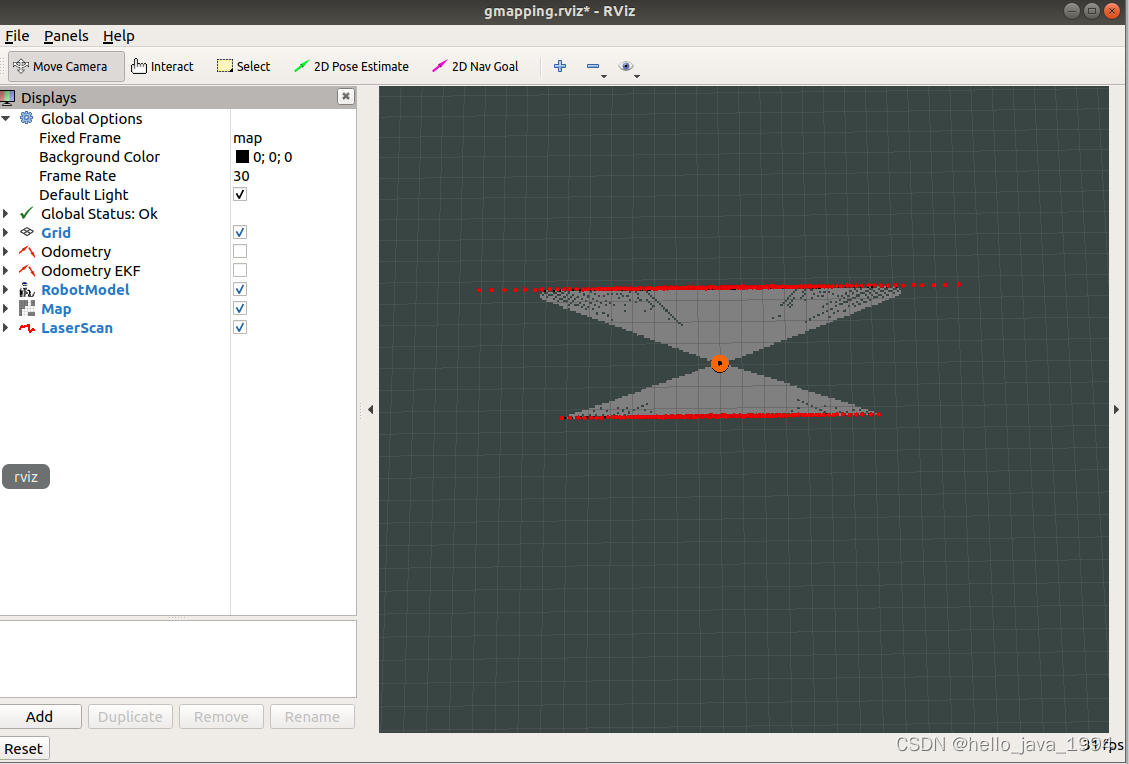
启动websocket:
roslaunch rosbridge_server rosbridge_websocket.launch

2.3 查看ROS机器人IP地址
ifconfig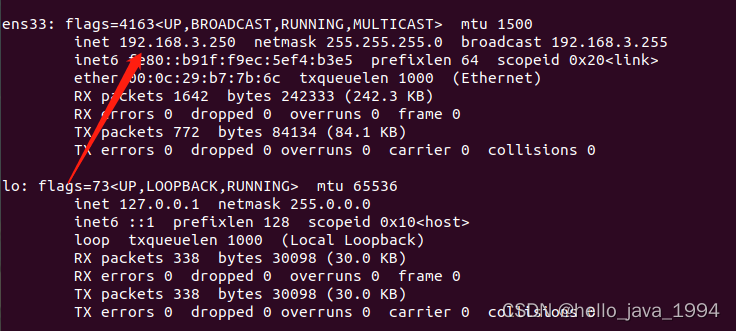
3、web端配置:
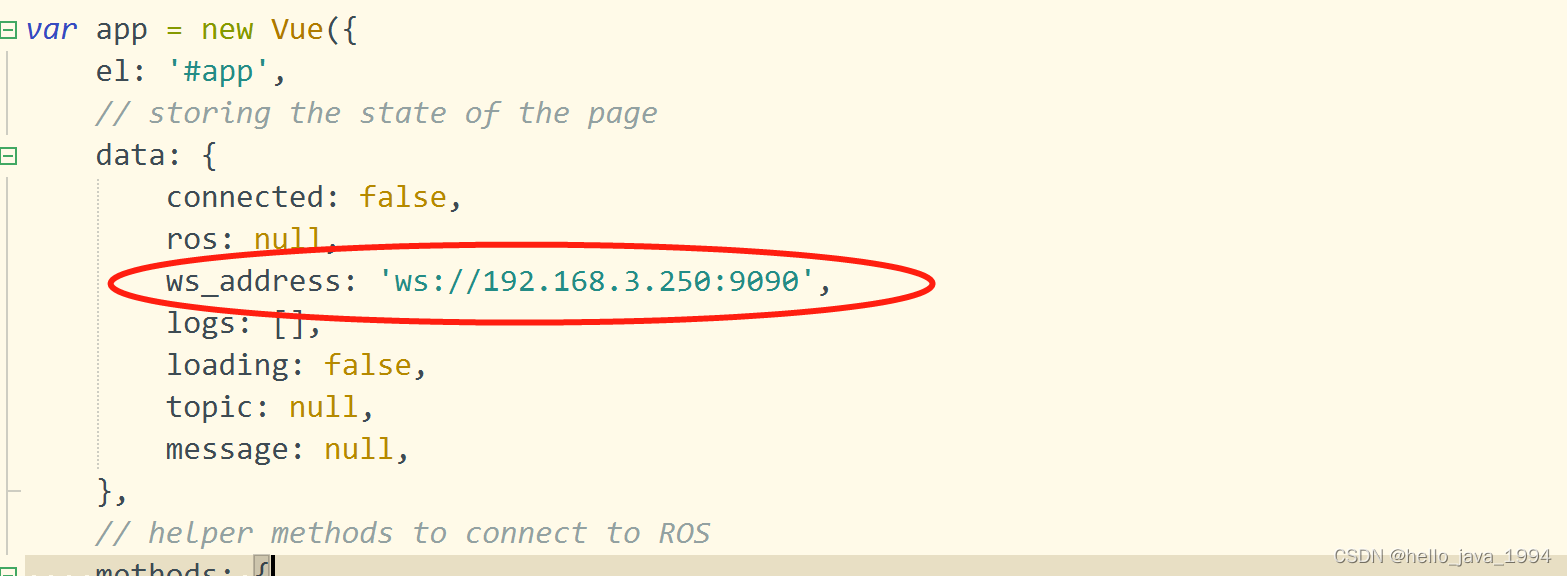
3.1 配置web端地址,指向ros机器人,使用websocket连接
index.html 配置:

main.js文件配置:
3.2 运行前端代码

注意:目前引用的脚本js链接在国外服务器,加载较慢。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小蓝xlanll/article/detail/107773

