
- 1基于大数据机器学习TF-IDF 算法+SnowNLP的智慧旅游数据分析可视化推荐系统_tf-idf推荐系统
- 2关于访问Spark管理界面hadoop01:8080的相关问题解决_spark成功启动网址进不去
- 3国产商用密码与国际密码对照_sha-1对应的国标标识
- 4[阅读笔记23][JAM]JOINTLY TRAINING LARGE AUTOREGRESSIVE MULTIMODAL MODELS
- 5bilibili高中物理讲的非常好的up主
- 6java-net-php-python-springboot博客系统计算机毕业设计程序
- 7基于udp做服务发现_udp3702端口
- 8Linux sysctl 网络相关参数_fwmark_reflect
- 9【C语言】2048小游戏【附源码】
- 1009|语义检索,利用Embedding优化你的搜索功能_embedding 搜索
大疆激光雷达livox avia 在ubuntu18.04+ROS中基本使用方法_avia使用方法
赞
踩
Readme
大疆livox avia 固态激光雷达操作步骤:
1.参考本人CSDN博客lsg_dawn中收藏中的一篇关于ubuntu18.04中使用livox avia 雷达的文章
Livox Avia 雷达测试使用 ----- 测试使用(Ubuntu18.04 + ROS Melodic)_杰尼君的博客-CSDN博客
2.连接好雷达和电脑的连线
3.关于虚拟机中的网络配置:
(1)虚拟机工具栏中,找到 虚拟机——>设置——>网络适配器——>桥接模式(复制物理网络连接 状态)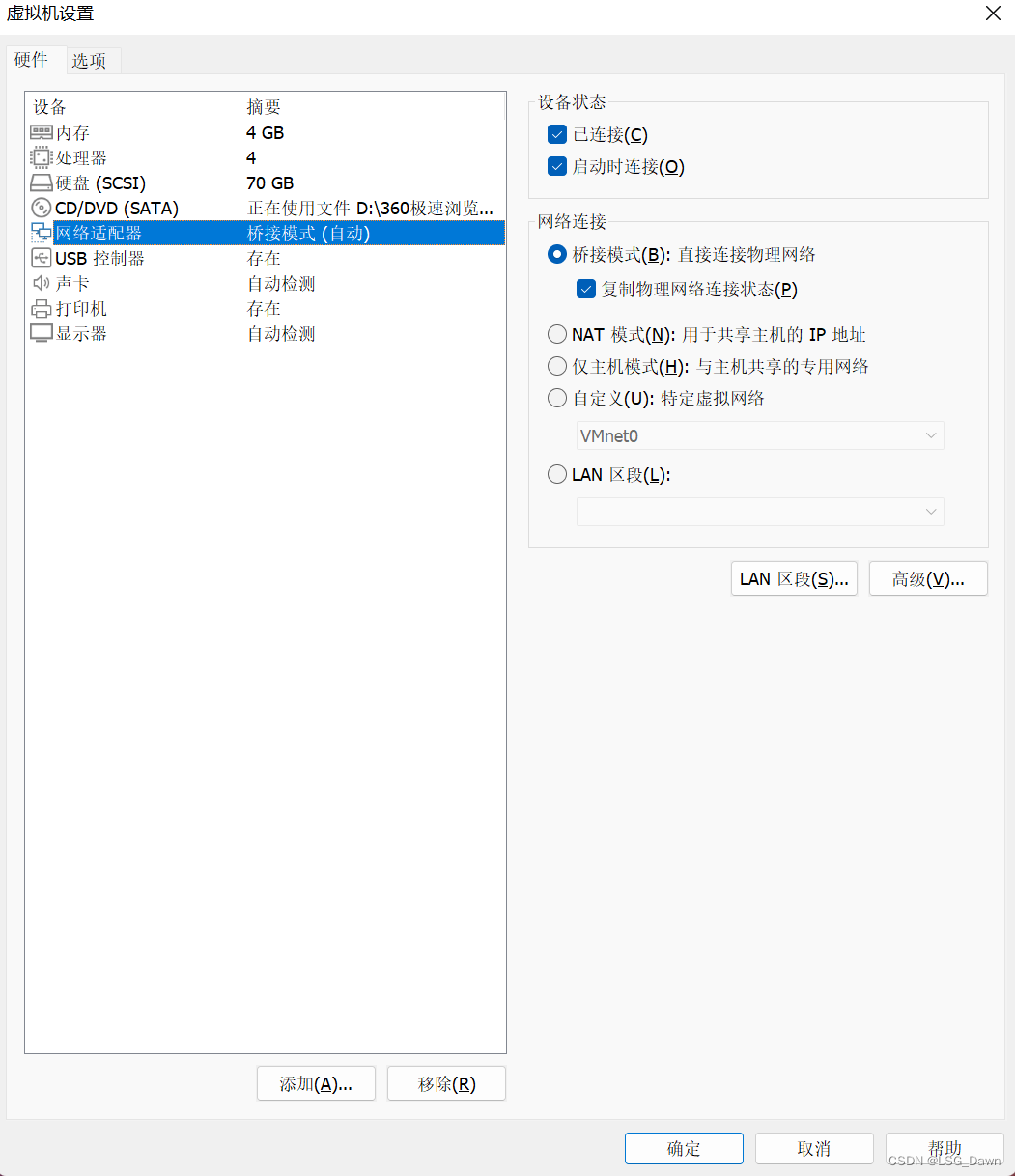
记得点击 确定 按钮
(2)重启虚拟机
(3)虚拟机界面右上角的网络配置,设置为手动 IP:192.168.1.2 子网掩码:255.255.255.0
(livox avia 激光雷达出厂时,默认IP地址为 192.168.1.x 虚拟机要与雷达同网段 )
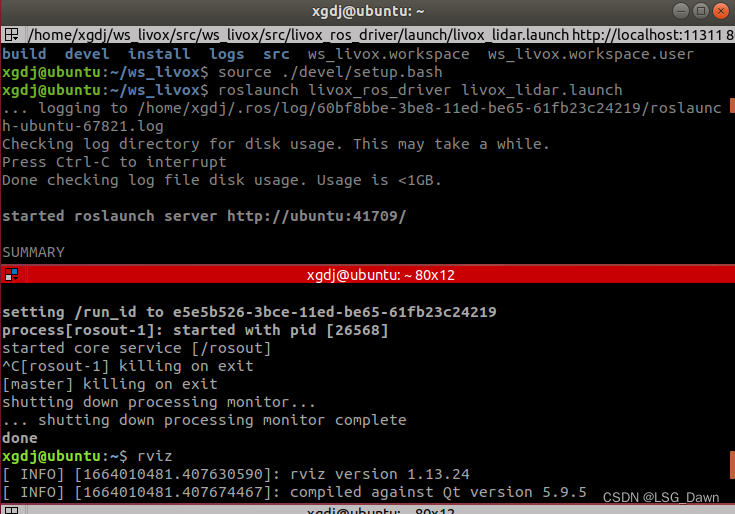
4.打开终端 cd ws_livox
方法一:
(1) source ./devel/setup.bash
(2) roslaunch livox_ros_driver livox_lidar_rviz.launch
此种方式启动的rviz只能在一个椭圆中显示点云,原因大疆的launch文件中配置的rviz应该有问题
方法二:
(1) source ./devel/setup.bash
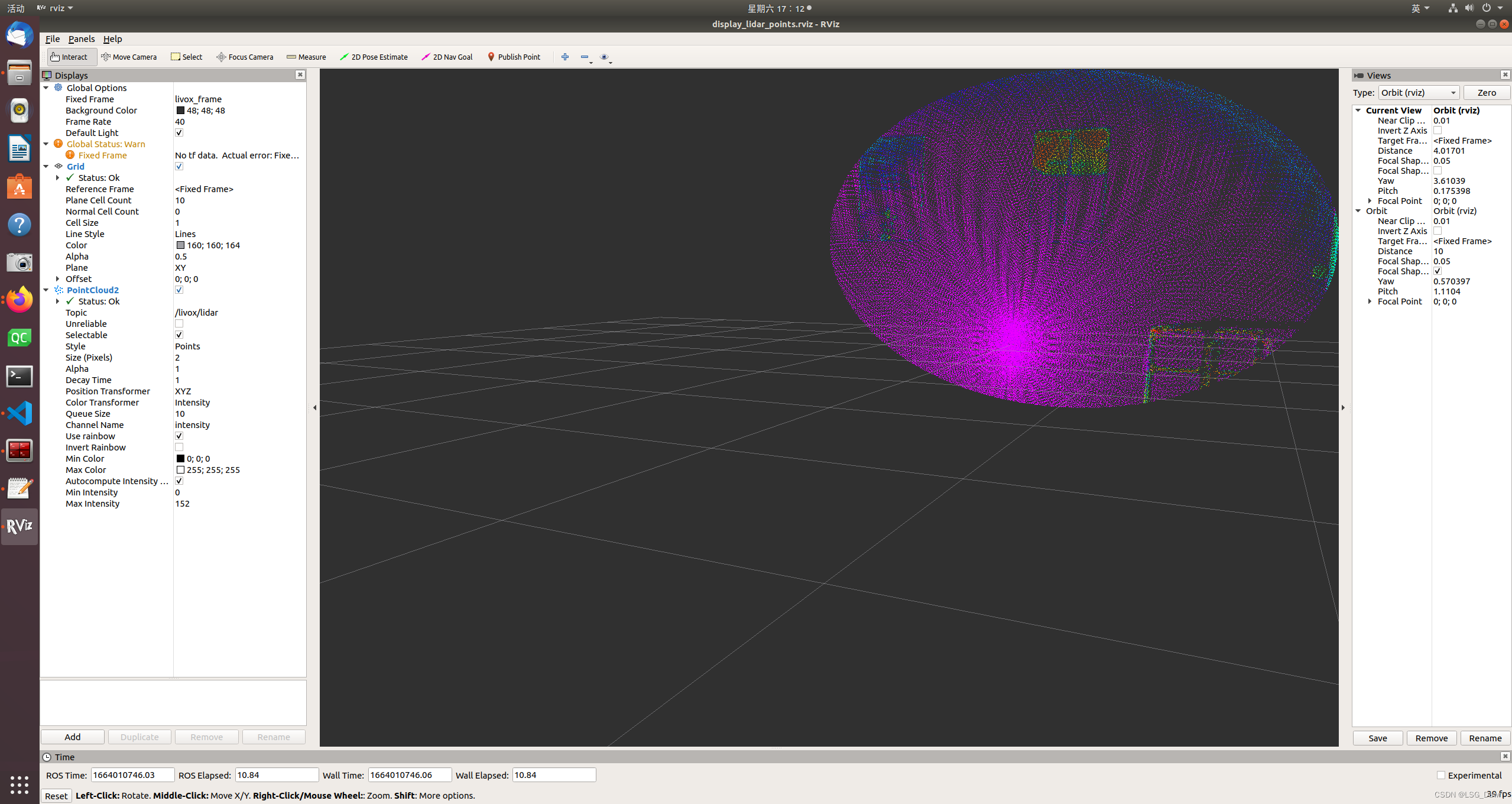
(2) roslaunch livox_ros_driver livox_lidar.launch
(3) rviz
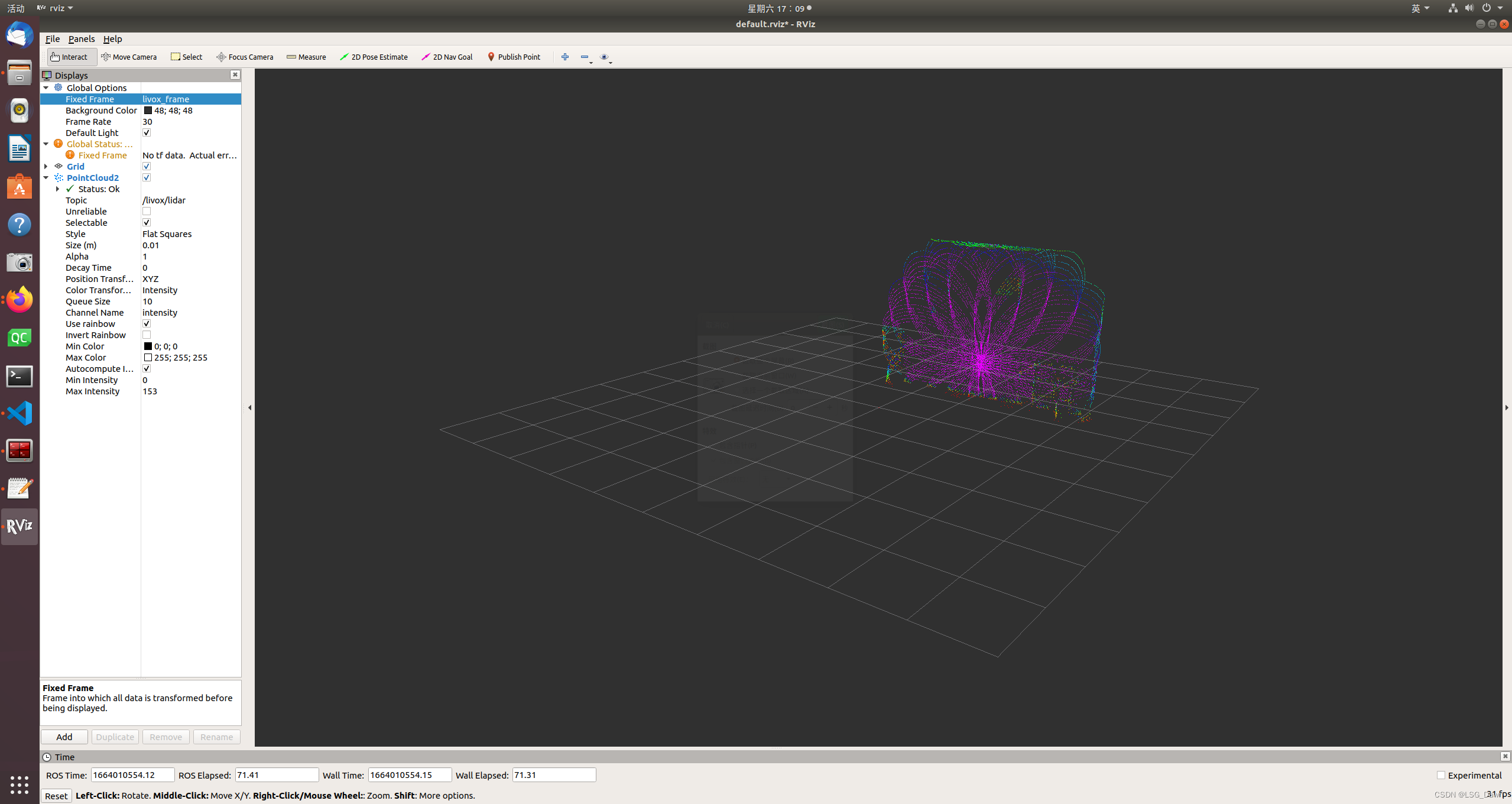
(4) 打开rviz的显示界面,Add 中选择PointCloud2,然后更改PointCloud2下的Topic:/livox/lidar
然后更改上方Global Options下的 Fixed Frame: livox_frame
5.rviz可视化界面自动打开,显示出点云
数据格式的转化:
windows下扫描出的点云 .lvx文件 转化成ubuntu的ROS中得rosbag文件格式
3. 数据格式及其转换 — Livox wiki 0.1 文档 (livox-wiki-cn.readthedocs.io)

