
- 1*p++与(*p)++与*(p++)------自增运算符常见误区
- 2SpringBoot-插件化以及springboot扩展接口_spring boot spi第三方扩展
- 3图像增强:自适应直方图均衡化(AHE)
- 4微信公共号消息推送给你心爱的她/他-Python3版本_微信推送怎么创建python文件
- 5Spring Boot Helper插件免费版的下载_spring boot helper插件下载
- 6windows上搭建llama小型私有模型_llama-cpp-python
- 71.9 向量投影_向量投影法
- 8怎么样检查自己系统上的Python环境中是否有某个包(扩展库)?_python怎么检查是否有某个库
- 9三种安装docker-compose方式_docker compose安装
- 10Windows脚本 - Bat批处理命令使用教程_批处理 菜鸟教程
matlab机械臂建模运动学仿真+轨迹规划_二自由度机械臂直线轨迹规划matlab
赞
踩
Matlab机械臂仿真
1.内容参考B站视频:https://www.bilibili.com/video/BV1q44y1x7WC?spm_id_from=333.337.search-card.all.click
2.工具箱10.4版下载 https://download.csdn.net/download/yohnyang/86099523
3.关于机器人控制相关算法的C++实现可以详见我的专栏:https://blog.csdn.net/yohnyang/category_12119720.html
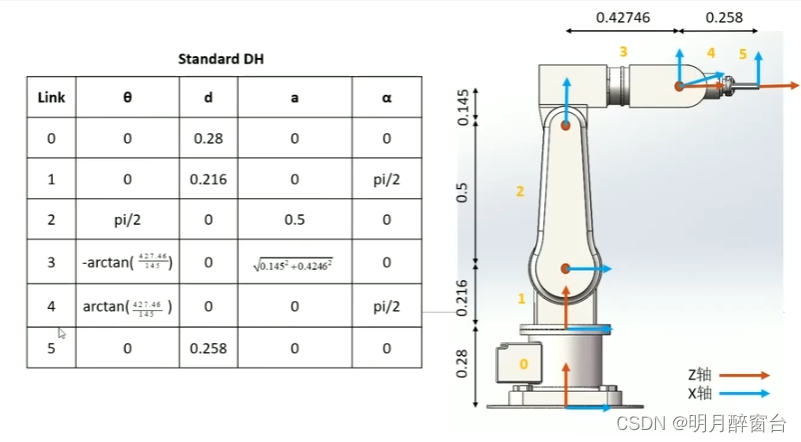
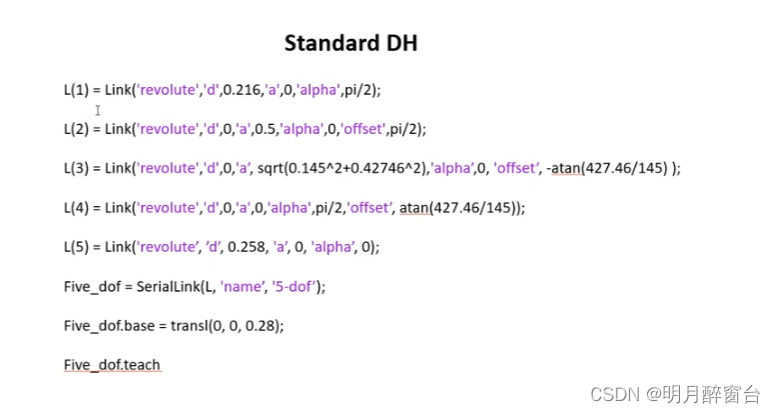
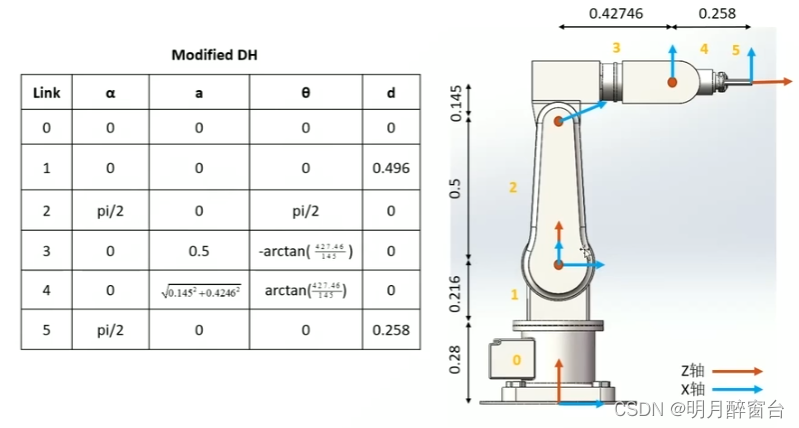
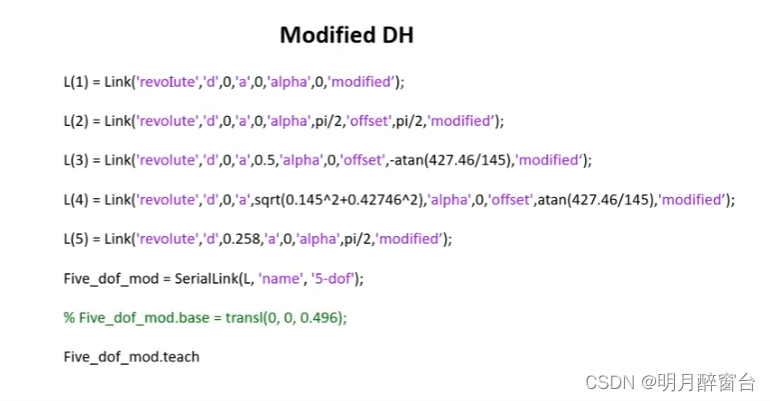
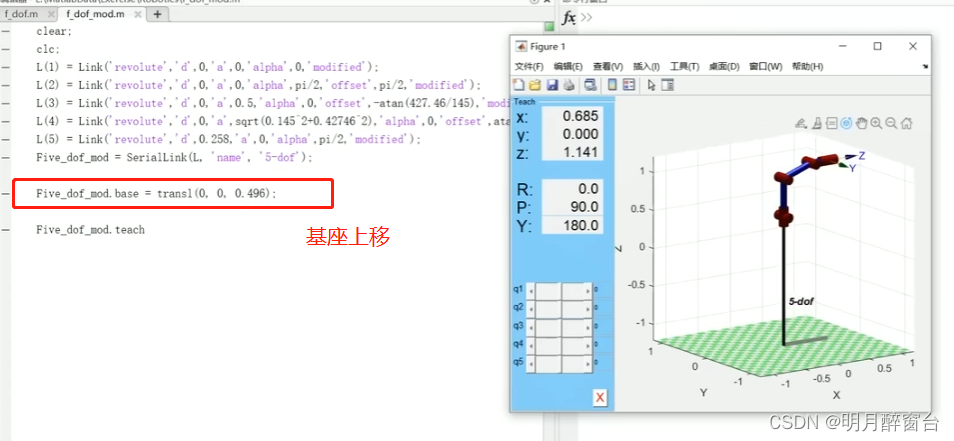
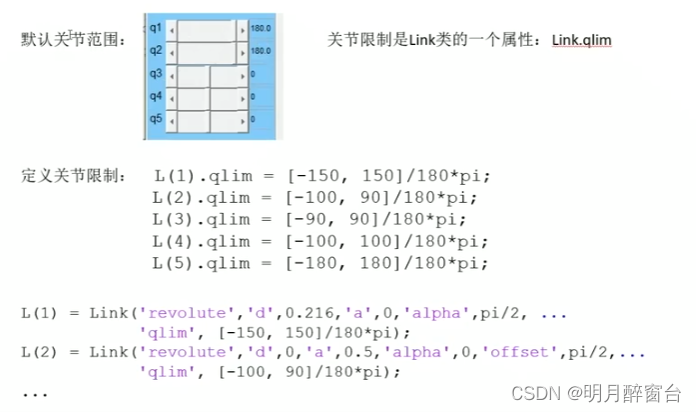
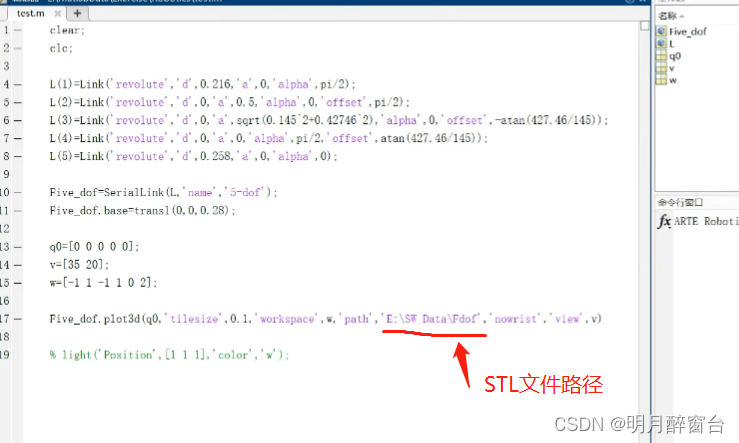
1.机械臂建模
Link类使用介绍:https://blog.csdn.net/qq_35551200/article/details/97030782
关于DH参数:即运动过程中固定不变的量是a和alpha,他们在模型初始化时被定义,theta是变量
theta:x转角 == y轴转角/绕z轴转角
d:沿z轴移动距离
a:沿x轴移动距离 == 关节长度
alpha:z轴转角 == 转轴朝向的旋转角度
——————
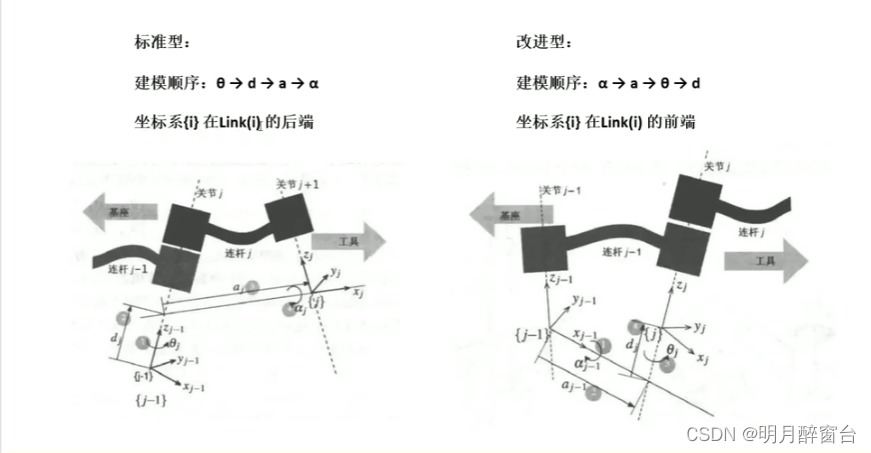
标准型和改进型中A和alpha定义相同,都是相对于下一关节而言,不同的是theta和D在标准型中都是相对于下一关节,在改进型中是相对于上一关节。
1.1DH标准型
theta:绕Zi轴,从Xi旋转到Xi+1的角度
D:沿Zi轴,从Xi移动到Xi+1的距离
A:沿Xi轴,从Zi移动到Zi+1的距离
alpha:绕Xi+1轴,从Zi旋转到Zi+1的角度
1.2DH改进型
theta:绕Zi轴,从Xi-1旋转到Xi的角度
D:沿Zi轴,从Xi-1移动到Xi的距离
A:沿Xi轴,从Zi移动到Zi+1的距离
alpha:绕Xi轴,从Zi旋转到Zi+1的角度
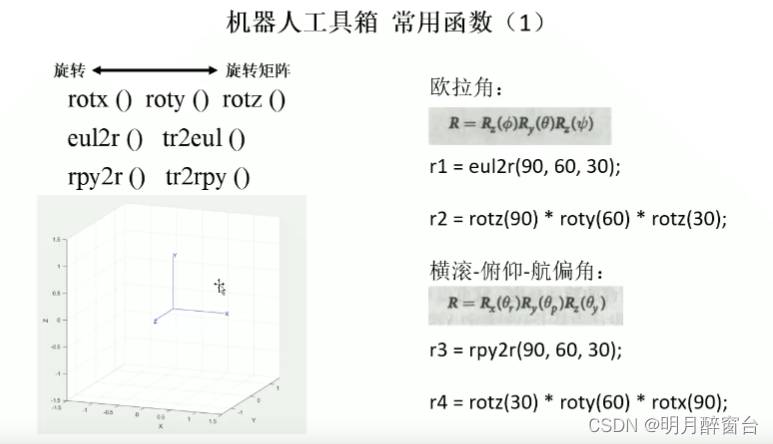
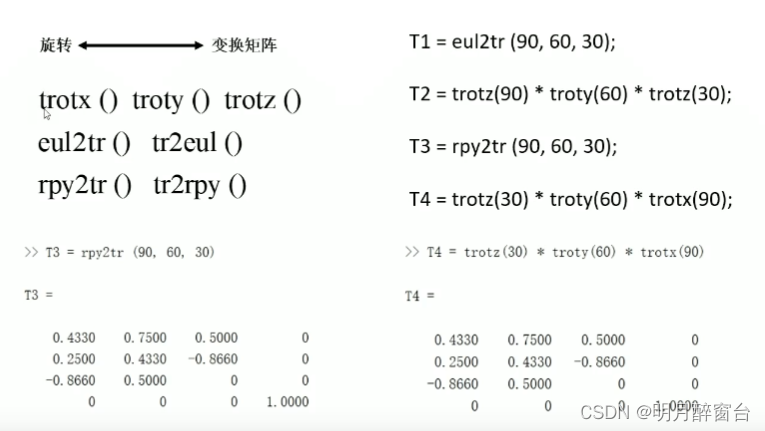
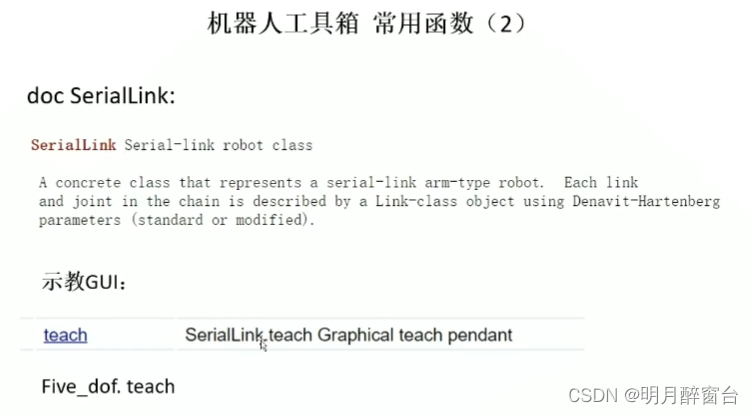
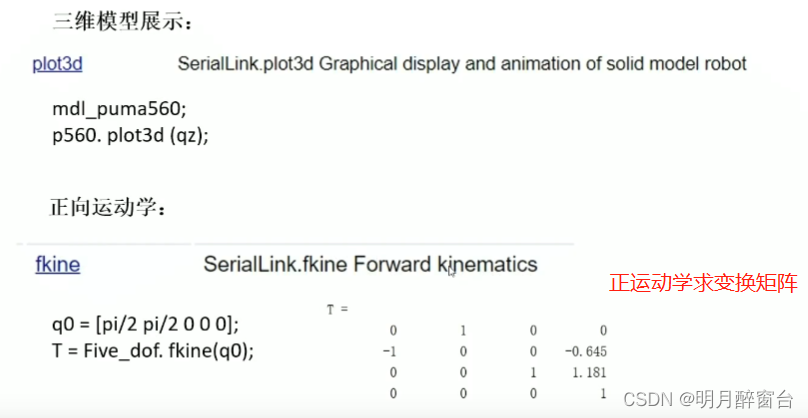
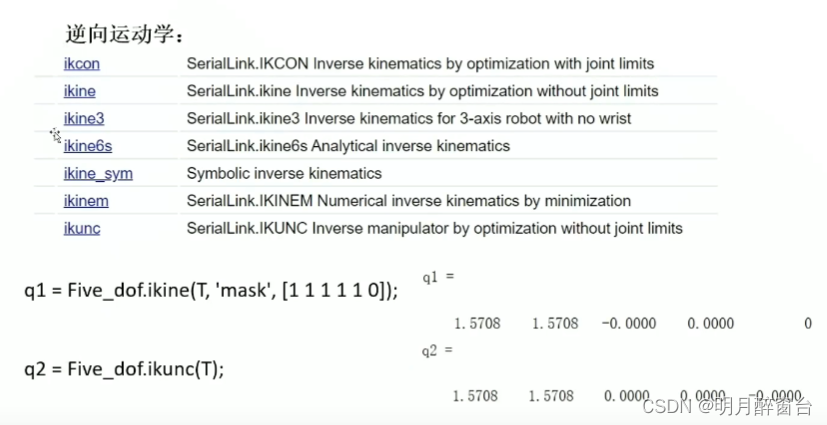
2.机器人工具箱常用函数
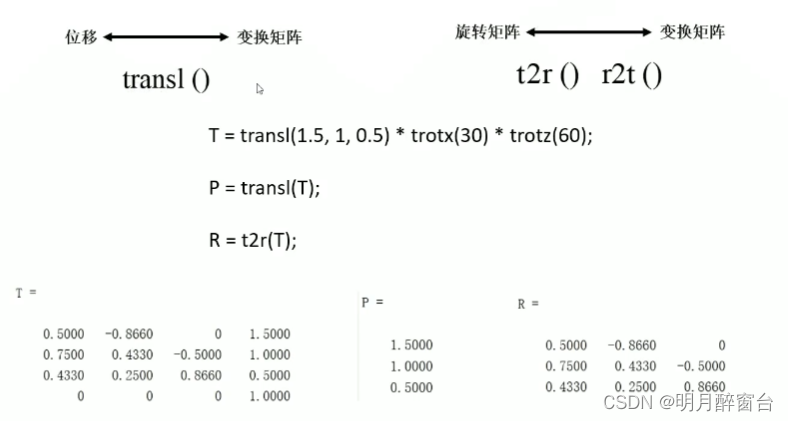
串联机械臂
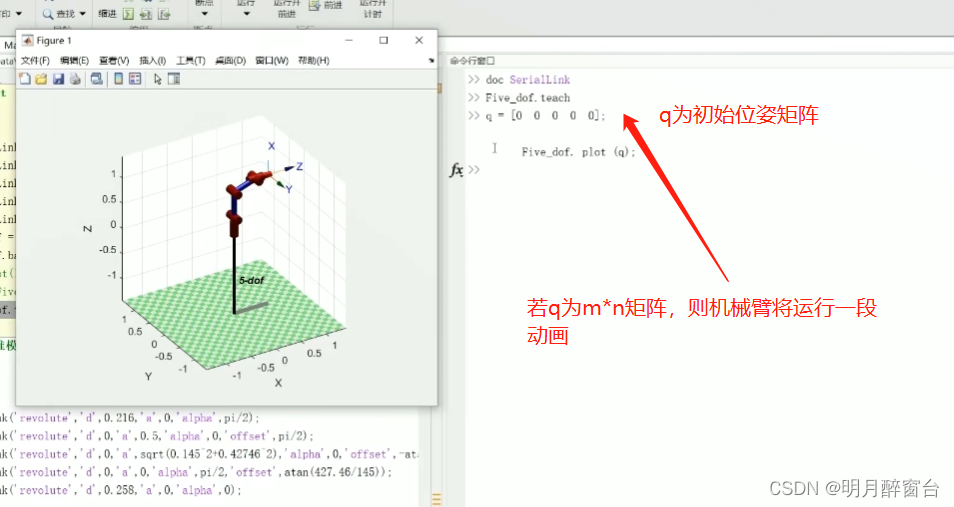

mask取值为0或1,设为0意味着不考虑第几个自由度
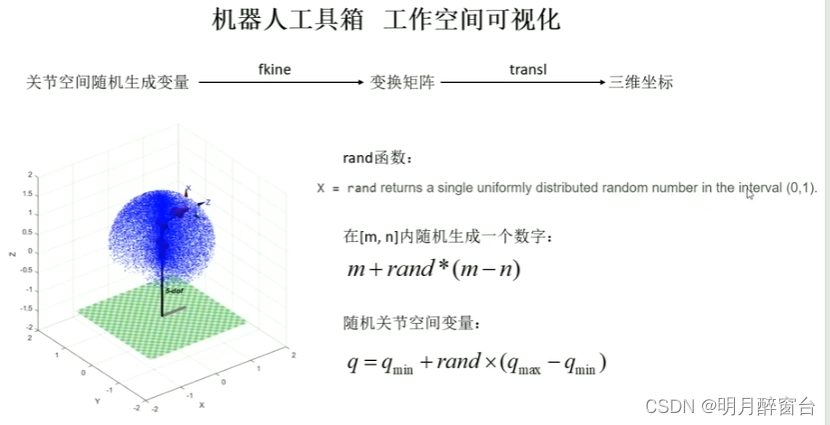
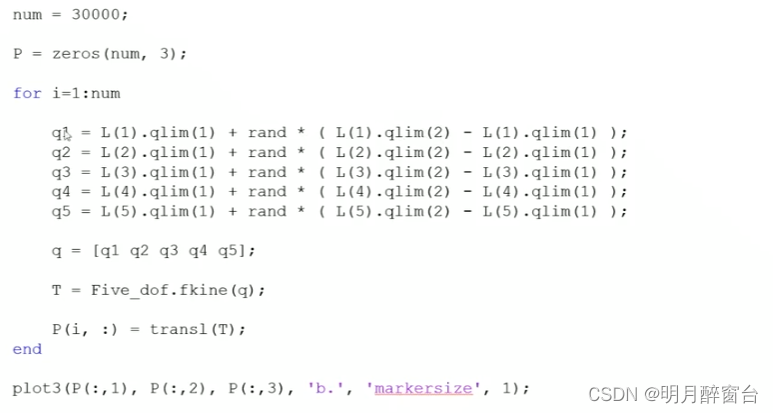
3.工作空间可视化
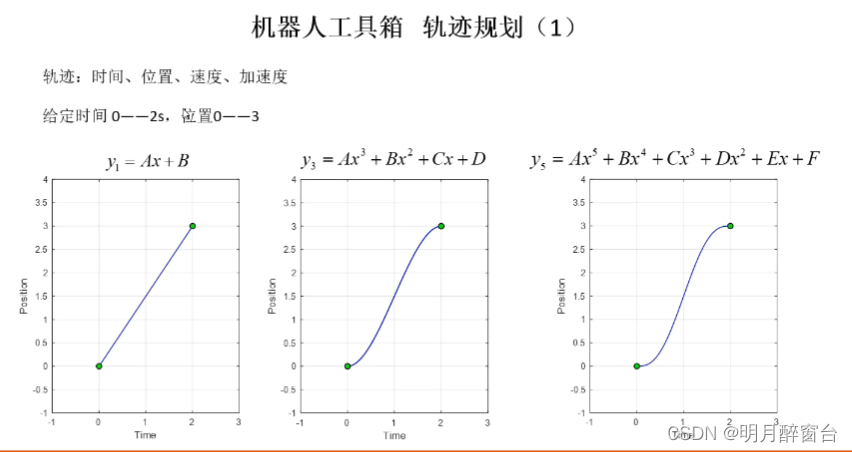
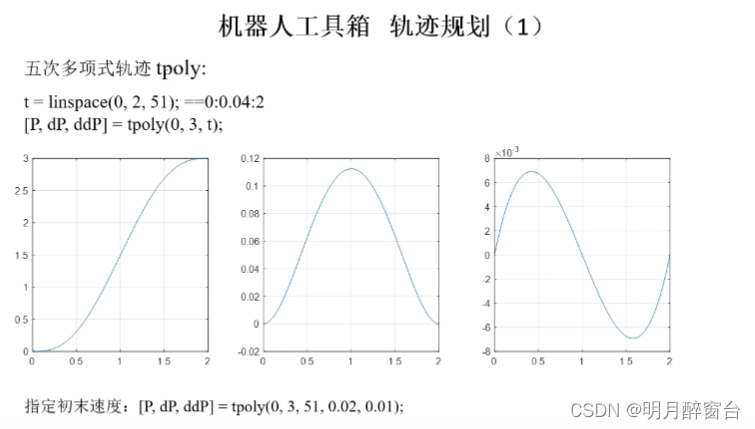
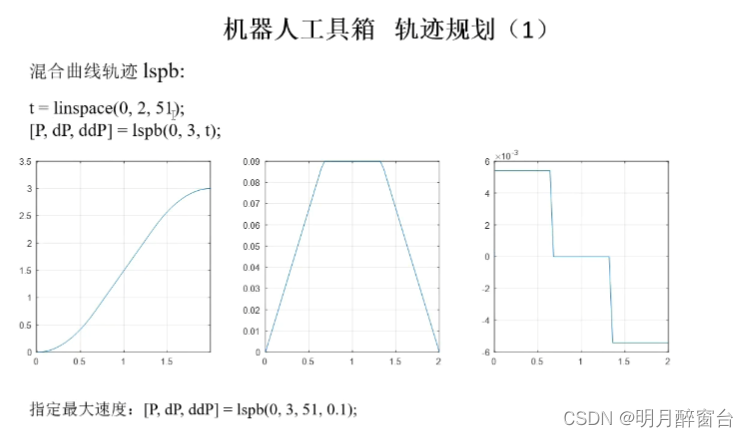
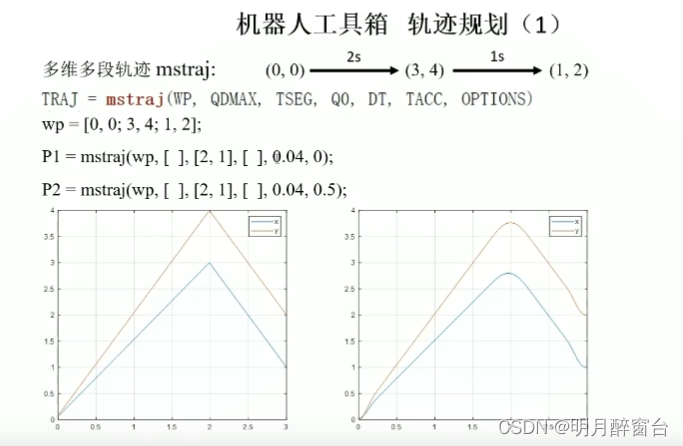
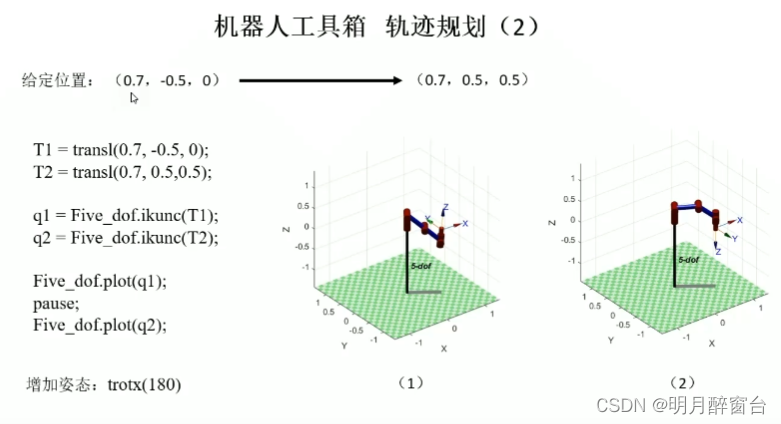
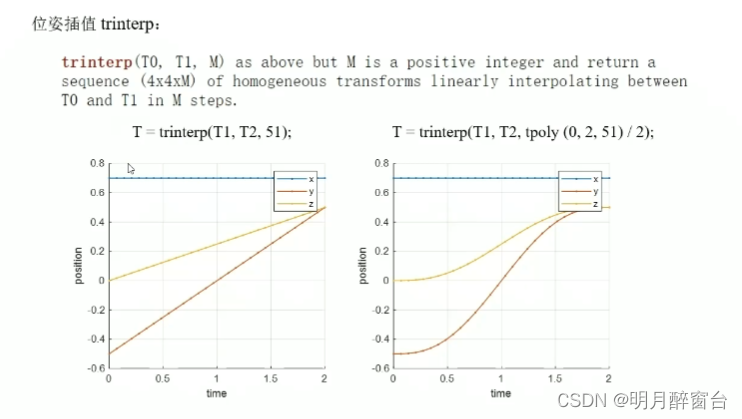
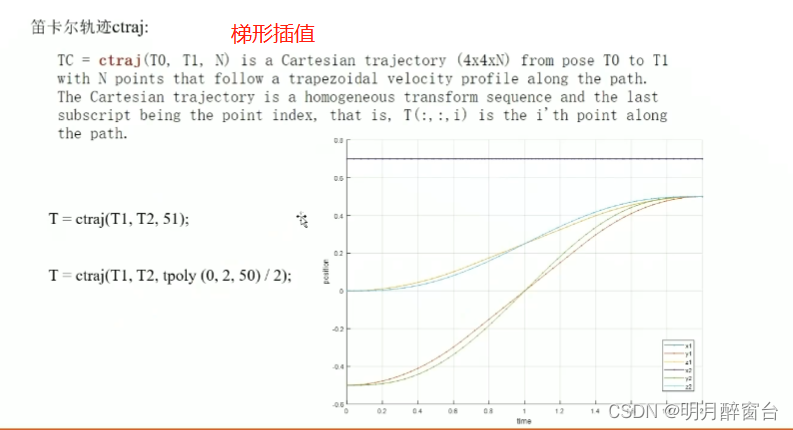
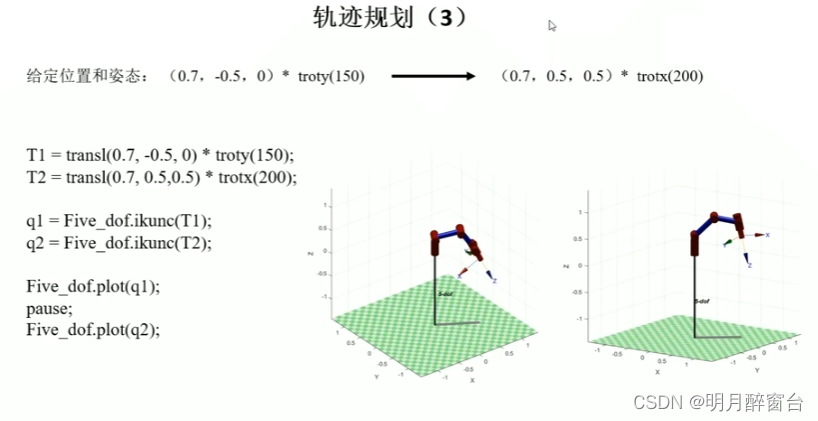
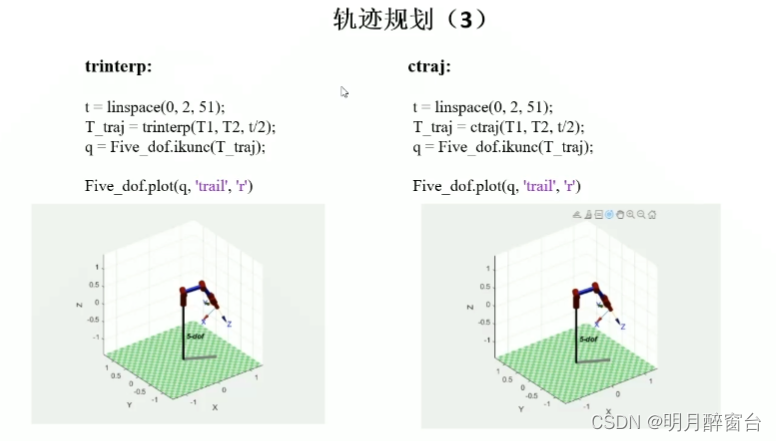
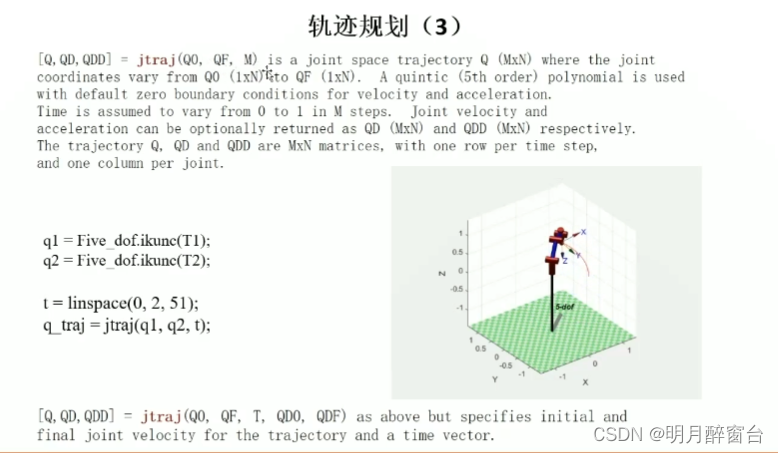
4.轨迹规划
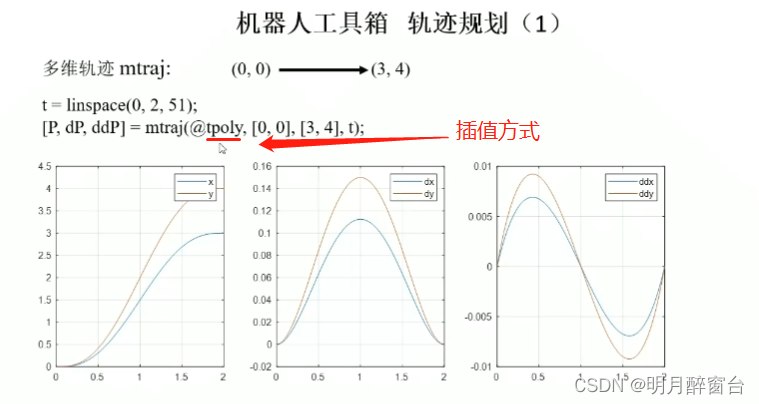
变换矩阵->求逆解->末端位姿->绘制路线
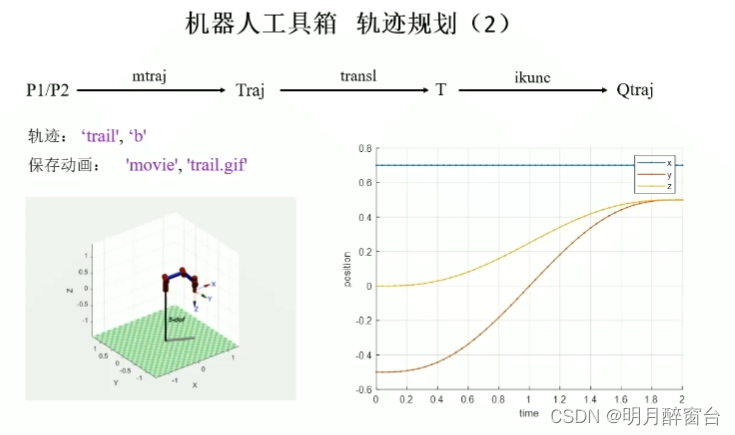
初始变换T1到末端位姿T2插值51次并返回51个变换矩阵T

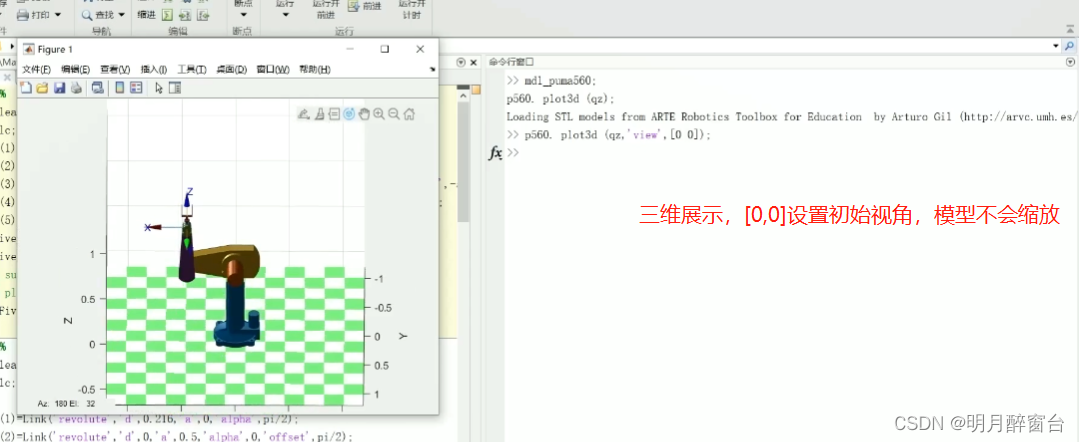
5.三维模型STL导入matlab
三维模型STL导入matlab
https://www.bilibili.com/video/BV1q44y1x7WC?p=9&vd_source=6960d76fda8b8bd4eb084c63b347e63f
先这样,后期再补

