
热门标签
当前位置: article > 正文
空间圆弧插补算法仿真
作者:我家自动化 | 2024-04-17 08:46:32
赞
踩
空间圆弧插补算法仿真
介绍
大部分空间圆弧插补的给定条件为三点,因为三点确定一平面。我这边因为使用场景为扫描机器,下发的参数有些要求,所以使用参数是圆心,起点,角度以及平面法向量ijk,其实都是一样的,只不过前面需要经过几层的转换罢了。
算法思路
刚开始做的时候,博主还是找了很多资料来看,网上也有各种的算法来支持,做完了之后觉得还是挺有收获的。
控制算法一般和电机相关,所以我们一律采用了s曲线规划来调试电机.,然后该算法只考虑了位置规划,没有姿态规划(我们姿态用的是探针,不用该算法控制)。
思路的话主要就是通过坐标系的转换,圆弧平面为一个坐标系,笛卡尔空间为第二个坐标系,主要就是在平面内得出的各个坐标点通过旋转矩阵,求出在笛卡尔坐标系下的坐标点。
步骤流程
- 在给定的输入条件后,得出圆弧上三点
- 根据三点求出旋转矩阵,判断圆弧走向正负(通过改变ijk来实现)
- 根据弧度和S规划来计算每时刻走过的弧度
- 进行插补离散点计算
代码块
根据圆心起点角度及ijk计算其他两点,都是按顺序计算
def circle_pos(self,theta,Center_vector,Start_vector,Normal_vector): x0 = Center_vector[0] y0 = Center_vector[1] z0 = Center_vector[2] ax = Normal_vector[0] ay = Normal_vector[1] az = Normal_vector[2] x1 = Start_vector[0] y1 = Start_vector[1] z1 = Start_vector[2] K = 1 - math.cos(theta) M = ax * x0 + ay * y0 + az * z0 x = (pow(ax,2) * K + math.cos(theta)) * x1 + (ax * ay * K - az * math.sin(theta)) * y1 + ( ax * az * K + ay * math.sin(theta)) * z1 + (x0 - ax * M) * K + (az * y0 - ay * z0) * math.sin(theta) y = (ax * ay * K + az * math.sin(theta)) * x1 + (pow(ay, 2) * K + math.cos(theta)) * y1 + ( ay * az * K - ax * math.sin(theta)) * z1 + (y0 - ay * M) * K + (ax * z0 - az * x0) * math.sin(theta) z = (ax * az * K - ay * math.sin(theta)) * x1 + (ay * az * K + ax * math.sin(theta)) * y1 + ( pow(az, 2) * K + math.cos(theta)) * z1 + (z0 - az * M) * K + (ay * x0 - ax * y0) * math.sin(theta) return x ,y, z

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
大家熟悉的s规划,里面稍微该了点输入
def _compute_maximum_speed_reached_or_not_reached(self,q0,q1, v0, v1, v_max, a_max, j_max): v_max = v_max/self.r a_max = a_max / self.r j_max = j_max / self.r if (v_max-v0)*j_max < a_max**2: # a_max is not reached Tj1 = np.sqrt((v_max-v0)/j_max) Ta = 2*Tj1 alima = Tj1 * j_max else: # a_max is reached Tj1 = a_max/j_max Ta = Tj1 + (v_max-v0)/a_max alima = a_max # Deceleration period if (v_max-v1)*j_max < a_max**2: # a_min is not reached Tj2 = np.sqrt((v_max-v1)/j_max) Td = 2*Tj2 alimd = Tj2 * (-j_max) else: # a_min is reached Tj2 = a_max/j_max Td = Tj2 + (v_max-v1)/a_max alimd = (-a_max) # print(Ta,Td) # 得出Ta和Td,下面要对这两个时间进行判定 Tv = (q1-q0)/v_max - (Ta/2)*(1+v0/v_max)-(Td/2)*(1+v1/v_max) #计算匀速段时间 # print (Tv) if Tv > 0: vlim = v_max else: Tv = 0 amax_org = a_max delta = (a_max**4)/(j_max**2) + 2*(v0**2+v1**2) + a_max*(4*(q1-q0) - 2*a_max/j_max*(v0 + v1)) Tj = a_max/j_max Tj1 = Tj Ta = (a_max**2/j_max - 2*v0 + np.sqrt(delta))/2/a_max Tj2 = Tj Td = ((a_max**2)/j_max - 2*v1 + np.sqrt(delta))/2/a_max if Ta < 0 or Td < 0: if Ta < 0: Ta = 0 Tj1 = 0 Td = 2*(q1-q0)/(v1 + v0) Tj2 = (j_max*(q1-q0) - np.sqrt(j_max*(j_max*((q1-q0)**2) + ((v1 + v0)**2)*(v1 - v0))))/j_max/(v1 + v0) alima = 0 alimd = -j_max*Tj2 vlim = v0 elif Td < 0: Td = 0 Tj2 = 0 Ta = 2 * (q1 - q0) / (v1 + v0) Tj1 = (j_max * (q1 - q0) - np.sqrt(j_max * (j_max * ((q1 - q0) ** 2) - ((v1 + v0) ** 2) * (v1 - v0)))) / j_max / (v1 + v0) alima = j_max * Tj1 alimd = 0 vlim = j_max * Tj1 elif Ta >= 2*Tj and Td >= 2*Tj: alima = a_max alimd = -a_max vlim = v0 + alima * (Ta - Tj) else: count = 0 while Ta < 2*Tj or Td < 2*Tj: count += 1 a_max = a_max - amax_org*0.01 Tj = a_max / j_max Tj1 = Tj Tj2 = Tj delta = (a_max ** 4) / (j_max ** 2) + 2 * (v0 ** 2 + v1 ** 2) + a_max * (4 * (q1 - q0) - 2 * a_max / j_max * (v0 + v1)) Ta = ((a_max**2)/j_max - 2*v0 + np.sqrt(delta))/2/a_max Td = ((a_max ** 2) / j_max - 2 * v1 + np.sqrt(delta)) / 2 / a_max if Ta<0 or Td <0: if Ta <0: Ta = 0 Tj1 = 0 Td = 2*(q1-q0)/(v0+v1) Tj2 = (j_max * (q1 - q0) - np.sqrt(j_max * (j_max * ((q1 - q0) ** 2) + ((v1 + v0) ** 2) * (v1 - v0)))) / j_max / (v1 + v0) alima = 0 alimd = -j_max*Tj2 vlim = v0 elif Td < 0: Td = 0 Tj2 = 0 Ta = 2*(q1-q0)/(v0+v1) Tj1 = (j_max * (q1 - q0) - np.sqrt(j_max * (j_max * ((q1 - q0) ** 2) - ((v1 + v0) ** 2) * (v1 - v0)))) / j_max / (v1 + v0) alima = j_max*Tj1 alimd = 0 vlim = j_max * Tj1 elif Ta >= 2*Tj and Td >= 2*Tj: alima = a_max alimd = -a_max vlim = v0+alima*(Ta -Tj) self.T = Tv + Ta + Td # print(Tv,"\n",Ta,"\n",Td,"\n",self.T) self.Tj1 = Tj1 self.Tj2 = Tj2 self.Ta = Ta self.Tv = Tv self.Td = Td self.alima = alima self.alimd = alimd self.vlim = vlim return Ta,Tv,Td def S_Pos_Traj(self,t,q0,q1,v0,v1,a_max,j_max): j_max = j_max / self.r if 0 <= t < self.Tj1: q = q0 + v0*t + j_max*(t**3)/6 elif self.Tj1 <= t < (self.Ta - self.Tj1): q = q0 + v0*t + self.alima/6*(3*(t**2) - 3*self.Tj1*t + self.Tj1**2) elif (self.Ta-self.Tj1) <= t < self.Ta: q = q0 + (self.vlim+v0)*self.Ta/2 - self.vlim*(self.Ta - t) + j_max*(self.Ta - t)**3/6 # Constant velocity phase elif self.Ta <= t < (self.Ta + self.Tv): q = q0 + (self.vlim+v0)*self.Ta/2 + self.vlim*(t-self.Ta) # Deceleration phase elif (self.T - self.Td) <= t < (self.T-self.Td+self.Tj2): q = q1 - (self.vlim+v1)*self.Td/2 + self.vlim*(t-self.T+self.Td) -j_max*((t-self.T+self.Td)**3)/6 elif (self.T-self.Td+self.Tj2) <= t < (self.T-self.Tj2): q = q1 - (self.vlim+v1)*(self.Td/2) + self.vlim*(t-self.T+self.Td) +self.alimd/6*(3*((t-self.T+self.Td)**2) - 3*self.Tj2*(t-self.T+self.Td) + self.Tj2**2) elif (self.T-self.Tj2) <= t <= self.T: q = q1 - v1*(self.T-t) - j_max*(((self.T-t)**3)/6) return q
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
求出每时刻走的弧长占总弧长的占比
def Normalization_S(self,pos,v0,v1,vmax,amax,jmax,t): q0 = 0 q1 = pos # q1 = 10 T_para = self._compute_maximum_speed_reached_or_not_reached(q0,q1,v0,v1,vmax,amax,jmax) T = T_para[0] + T_para[1] + T_para[2] print(T) self.N = math.ceil(T/t) j = 0 q = [] lambda_ = [] for i in np.arange(0,T,t): # q[j] = self.S_Pos_Traj(i,q0,q1,v0,v1,amax,jmax) tt = self.S_Pos_Traj(i,q0,q1,v0,v1,amax,jmax) q.append(tt) lambda_.append(q[j] / pos) j += 1 # print (j) # print (self.N) return lambda_
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
主程序如下:
def SpaceCircle(self,theta,Center_vector,Start_vector, QS, QD, v0,v1,vmax,amax,jmax,t): the = theta / 2 Mid_vector = self.circle_pos(the, Center_vector, Start_vector, Normal_vector) End_vector = self.circle_pos(theta/1.8, Center_vector, Start_vector, Normal_vector) x1 = Start_vector[0] x2 = Mid_vector[0] x3 = End_vector[0] y1 = Start_vector[1] y2 = Mid_vector[1] y3 = End_vector[1] z1 = Start_vector[2] z2 = Mid_vector[2] z3 = End_vector[2] #圆弧上3个坐标 A1 = (y1 - y3) * (z2 - z3) - (y2 - y3) * (z1 - z3) B1 = (x2 - x3) * (z1 - z3) - (x1 - x3) * (z2 - z3) C1 = (x1 - x3) * (y2 - y3) - (x2 - x3) * (y1 - y3) x0 = Center_vector[0] y0 = Center_vector[1] z0 = Center_vector[2] ##圆心 self.r = np.sqrt(pow((x1-x0), 2) + pow((y1-y0), 2) + pow((z1-z0) , 2)) L = np.sqrt(float(A1*A1 + B1*B1 + C1*C1)) ax = A1 / L ay = B1 / L az = C1 / L ##新坐标z0方向余弦 nx = (x1-x0) / self.r ny = (y1-y0) / self.r nz = (z1-z0) / self.r ##新坐标x0方向余弦 o = np.cross([ax,ay,az] , [nx,ny,nz]) ox = o[0] oy = o[1] oz = o[2] ##新坐标Y0的方向余弦 T = np.mat([[nx, ox, ax, x0], [ny, oy, ay, y0], [nz, oz, az, z0], [0, 0, 0, 1]]) #变换矩阵 T_ni = np.linalg.inv(T) new_axis_x = np.append(np.array(Start_vector), 1) new_axis_y = np.append(np.array(Mid_vector), 1) new_axis_z = np.append(np.array(End_vector), 1) S_ = T_ni * new_axis_x.reshape(new_axis_x.shape[0], 1) sss = new_axis_x.reshape(new_axis_x.shape[0], 1) M_ = T_ni * new_axis_y.reshape(new_axis_y.shape[0], 1) D_ = T_ni * new_axis_z.reshape(new_axis_z.shape[0], 1) x1_ = S_[0]; y1_ = S_[1]; z1_ = S_[2] x2_ = M_[0]; y2_ = M_[1]; z2_ = M_[2] x3_ = D_[0]; y3_ = D_[1]; z3_ = D_[2] ##圆弧顺逆时针判断 if (math.atan2(y2_, x2_) < 0): angle_SOM = math.atan2(y2_, x2_) + 2 * math.pi else: angle_SOM = math.atan2(y2_, x2_) if (math.atan2(y3_, x3_) < 0): angle_SOD = math.atan2(y3_, x3_) + 2 * math.pi else: angle_SOD = math.atan2(y3_, x3_) ##逆时针 if (angle_SOM < angle_SOD): flag = 1 ##顺时针 if (angle_SOM >= angle_SOD): flag = -1 if theta>0 : delta_ang = theta else: delta_ang = -theta x_ = [] y_ = [] x = [] y = [] z = [] Planning_factors = self.Normalization_S(delta_ang,v0,v1,vmax,amax,jmax,t) for i in range(0,self.N): x_.append(flag * self.r * math.cos(Planning_factors[i] * delta_ang)) y_.append(flag * self.r * math.sin(Planning_factors[i] * delta_ang)) P = T * [[x_[i]], [y_[i]], [0], [1]] pp = P.tolist() x.append(pp[0]) y.append(pp[1]) z.append(pp[2]) xx = [float(x) for item in x for x in item] yy = [float(x) for item in y for x in item] zz = [float(x) for item in z for x in item] with open("data.csv", 'w+',newline="") as f: write = csv.writer(f) write.writerow(xx) write.writerow(yy) write.writerow(zz) return xx,yy,zz,x0,y0,z0
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
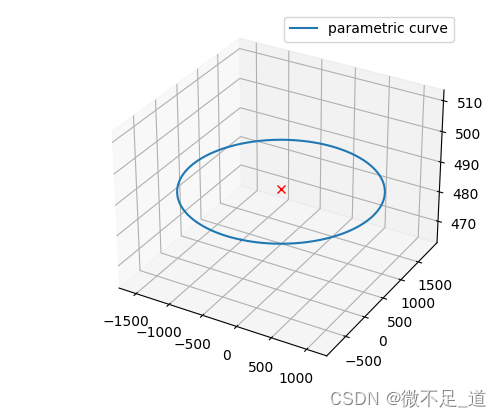
if __name__ == "__main__": ACTION = Arc_space() Start_vector = [-45,-777,488] Center_vector = [-241, 536, 488] Normal_vector = [0,0, 1] theta = 2*math.pi QS = 0 QD = 0 v0 = 0 v1 = 0 vmax = 48500 amax = 485000 jmax = 48500000 t = 0.0001 # B = ACTION.test(Start_vector,Center_vector,Normal_vector) A = ACTION.SpaceCircle(theta,Center_vector,Start_vector, QS, QD, v0,v1,vmax,amax,jmax,t) fig = plt.figure(1) ax = fig.add_subplot(111, projection='3d') ax.plot(A[0],A[1],A[2], label='parametric curve') ax.plot(A[3], A[4], A[5],c = "r", marker = "x") ax.legend() plt.show()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
仿真结果如下图
总结
该算法中没有任何的约束及不可控点的排除,工程需要加上约束,不然可能会有惊喜哦!
改算法只是还并不完善,大概 的思路及方式是ok的,可能后面根据一些要求会进行二次的开发。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/我家自动化/article/detail/439258
推荐阅读
相关标签

