
- 1基于Java+Springboot+Vue+elememt宠物用品商城系统设计实现
- 2combox控件下拉框里赋默认值_PyQT5控件:下拉列表框(QComboBox)
- 3ubuntu下安装jupyter notebook问题。ERROR: Package ‘ipython‘ requires a different Python: 3.5.2 not in 」=3.6
- 4STM32F103定时器的PWM用法_stm32f103 pwm引脚
- 5一篇了解SSO单点登录_xxl-sso
- 6大数据毕业设计 深度学习图像检索算法研究与实现 - python
- 7【华为OD】C卷真题 100分:手机App防沉迷系统 C/C++代码实现[思路+代码]_手机app防沉迷系统华为od
- 8Hive中rank()、row_number()函数的用法_hive rank函数怎么用
- 9Ubuntu中完全卸载Nginx_ubuntu卸载nginx动态模块
- 10强化学习应用(六):基于Q-learning的物流配送路径规划研究(提供Python代码)_基于强化学习的物流配送
FPGA初步学习之串口发送模块【单字节和字符串的发送】_fpga发送固定字符串
赞
踩
串口相关简介
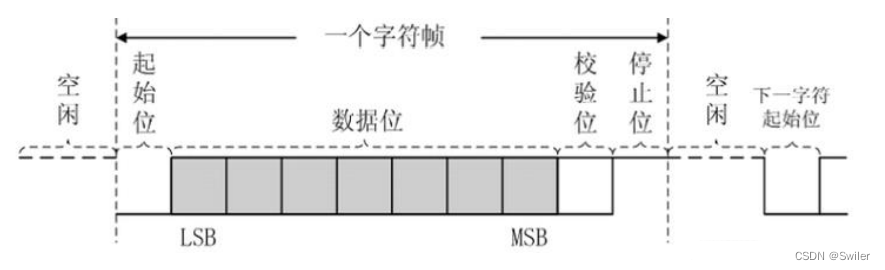
UART 在发送或接收过程中的一帧数据由4部分组成,起始位、数据位、奇偶校验位和停止位,如图所示。其中,起始位标志着一帧数据的开始,停止位标志着一帧数据的结束,数据位是一帧数据中的有效数据。
通常用的串口数据帧格式是:8位数据位,无校验位,1位停止位。
所以一帧数据有10个bit:1bit起始位,8bit数据位,1bit停止位。
关于串口波特率
串口波特率是指串口通信的速率,它表示每秒传输二进制数据的位数,单位是bps(位 /秒),常用的波特率有9600、19200、38400、57600以及115200等。
FPGA如何通过系统时钟来得到串口波特率呢?
已知串口时钟为50Mhz = 50000000hz,生成串口波特率为9600。
那么我们需要在FPGA里构建两个计数器。一个系统时钟计数器用来计数系统时钟周期数,一个串口时钟计数器,用来计数对应串口波特率的时钟周期数。
系统时钟:sys_clk,系统时钟计数值:sys_cnt。
串口时钟计数值:tx_cnt。
当sys_cnt = 50000000 / 9600时,tx_cnt计数一次,相当于串口时钟的一个周期。
数据是怎么发送出去的呢?
由上一个问题的解答已经得到了【串口时钟】这么一个东西,那么发送数据都是在该时钟下进行发送。
按照前面所提到的数据格式【1bit起始位,8bit数据位,1bit停止位】,那么就可以知道,发送一个8位的数据,需要在10个串口时钟周期下,将10bit的数据对应好时序一个个发出去。
数据是怎么接收的呢?
类似于上个问题,只需要按照时序,检测起始位,接收数据,再检测停止位即可。
那么这样是否就能够搭建好串口模块呢?
答案明显是不能的,FPGA并不知道什么时候该发数据,什么时候该收数据,什么时候进入发送状态,什么时候脱离发送状态。这时候还要添加其他信号来打辅助。比如添加发送使能信号来确定什么时候发数据,添加状态信号来表示串口是空闲还是忙碌等一系列的状态。
串口发送子模块的搭建
串口发送子模块相关参数
module uart_send( input sys_clk, //系统时钟 input sys_rst_n, //系统复位,低电平有效 //由其他模块输入 input uart_en, //发送使能信号 input [7:0] uart_din, //待发送数据 //输出给其他模块 output uart_tx_busy, //发送忙状态标志 output reg tx_flag, //发送过程标志信号 output reg [ 7:0] tx_data, //寄存发送数据 output reg [ 3:0] tx_cnt, //发送数据计数器 output reg uart_txd //UART发送端口,即tx引脚 ); //parameter define parameter CLK_FREQ = 50000000; //系统时钟频率 parameter UART_BPS = 9600; //串口波特率 //为得到指定波特率,对系统时钟计数BPS_CNT次 localparam BPS_CNT = CLK_FREQ/UART_BPS; //reg define reg uart_en_d0; reg uart_en_d1; reg [15:0] clk_cnt; //系统时钟计数器 //wire define wire en_flag;

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
在该子模块中的参数可分为三个部分:
- 系统时钟和复位。
- 由其它模块发送来的使能信号和待发送的数据。
- 本模块正在执行功能时的标志信号,本模块的数据接口,相关计数器,以及UART串口TX的物理IO口。
根据这些参数,可以大致知道串口发送1个bit数据的流程:
- 首先模块通过uart_en收到发送使能信号,则首先拉高tx_flag信号,同时uart_tx_busy会接受tx_flag的值。
- 当uart_en拉高后,en_flag会获取一个脉冲,当检测到这个脉冲后,则说明串口进入发送状态。
- 进入发送过程后要做三件事:寄存待发送的数据,启动系统时钟计数器,启动发送数据计数器。
- 发送数据计数器开始计数,直到计数值等于9时会自动清零,计数器一次计数循环即意味着一个8bit的数据发送完。
- 在发送过程中,[7:0]tx_data要将8个bit的数据从低位到高位传给[1:0]uart_txd,首先发送一个低电平作为起始位,然后发送tx_data的8个bit,最后发送一个高电平表示停止位。
- 经过这么一个过程,一个8位数据就通过FPGA串口的TX引脚发送出去了。
发送子模块中的逻辑块
获取使能信号脉冲
//捕获uart_en上升沿,得到一个时钟周期的脉冲信号
assign en_flag = (~uart_en_d1) & uart_en_d0;
//对发送使能信号uart_en延迟两个时钟周期
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
uart_en_d0 <= 1'b0;
uart_en_d1 <= 1'b0;
end
else begin
uart_en_d0 <= uart_en;
uart_en_d1 <= uart_en_d0;
end
end
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
通过两次寄存和取反与等操作,将高电平信号转化为一个脉冲信号,作为使能信号。
进入发送过程和退出发送过程
//当脉冲信号en_flag到达时,寄存待发送的数据,并进入发送过程 always @(posedge sys_clk or negedge sys_rst_n) begin if (!sys_rst_n) begin tx_flag <= 1'b0; tx_data <= 8'd0; end else if (en_flag) begin //检测到发送使能上升沿 tx_flag <= 1'b1; //进入发送过程,标志位tx_flag拉高 tx_data <= uart_din; //寄存待发送的数据 end //计数到停止位结束时,停止发送过程(并提前1/16个串口时钟) else if ((tx_cnt == 4'd9) && (clk_cnt == BPS_CNT - (BPS_CNT/16))) begin tx_flag <= 1'b0; //发送过程结束,标志位tx_flag拉低 tx_data <= 8'd0; end else begin tx_flag <= tx_flag; tx_data <= tx_data; end end
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
两个计数器
计数器的作用是保证数据按照特定波特率被发送出去
//进入发送过程后,启动系统时钟计数器 always @(posedge sys_clk or negedge sys_rst_n) begin if (!sys_rst_n) clk_cnt <= 16'd0; else if (tx_flag) begin //如果处于发送过程 if (clk_cnt < BPS_CNT - 1) clk_cnt <= clk_cnt + 1'b1; else clk_cnt <= 16'd0; //系统时钟计数一个波特率周期后清零 end else clk_cnt <= 16'd0; //发送过程结束 end //进入发送过程后,启动发送数据计数器 always @(posedge sys_clk or negedge sys_rst_n) begin if (!sys_rst_n) tx_cnt <= 4'd0; else if (tx_flag) begin //处于发送过程 if (clk_cnt == BPS_CNT - 1) //对系统时钟计数达一个波特率周期 tx_cnt <= tx_cnt + 1'b1; //此时发送数据计数器加1 else tx_cnt <= tx_cnt; end else tx_cnt <= 4'd0; //发送过程结束 end
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
将8bit数据按bit拆分,并按顺序赋值给tx端口
//根据发送数据计数器来给uart发送端口赋值 always @(posedge sys_clk or negedge sys_rst_n) begin if (!sys_rst_n) uart_txd <= 1'b1; else if (tx_flag) case(tx_cnt) 4'd0: uart_txd <= 1'b0; //起始位 4'd1: uart_txd <= tx_data[0]; //数据位最低位 4'd2: uart_txd <= tx_data[1]; 4'd3: uart_txd <= tx_data[2]; 4'd4: uart_txd <= tx_data[3]; 4'd5: uart_txd <= tx_data[4]; 4'd6: uart_txd <= tx_data[5]; 4'd7: uart_txd <= tx_data[6]; 4'd8: uart_txd <= tx_data[7]; //数据位最高位 4'd9: uart_txd <= 1'b1; //停止位 default: ; endcase else uart_txd <= 1'b1; //空闲时发送端口为高电平 end
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
发送字符串模块
子模块写好后,可以再做一个顶层模块,用来发送字符串。
发送字符串的思路:
当满足某个条件后,使能串口发送信号,此时串口就开始发送数据了,当在串口发送数据的时候,串口就处在发送忙状态,此时我们就可以更新一次待发送的数据。为什么可以在发送的时候更新待发送数据呢?因为在进入发送过程后,数据还没发送前的时间里,待发送的数据就已经寄存在了子模块里的一个寄存器里了。这样就节约了数据更新的时间了。
相关代码如下:
module uart_loopback_top( input sys_clk, //外部50M时钟 input sys_rst_n, //外部复位信号,低有效 output uart_txd //UART发送端口 ); //parameter define parameter CLK_FREQ = 50000000; //定义系统时钟频率 parameter UART_BPS = 115200; //定义串口波特率 //wire define reg [7:0] uart_send_data; //UART发送数据 wire uart_tx_busy; //UART发送忙状态标志 reg uart_send_en; //UART发送使能 reg [31:0] data_cnt; reg send_d0; reg send_d1; wire send_en; reg string_end; //停止字符串发送 reg [ 31:0] Data_Count; //字符计数器 parameter [31:0] Data_Len=32'd10; //字符串的长度 reg [7:0] arry [Data_Len-1:0]; //定义要发送的字符串 //初始化字符串 initial begin arry[0] = "H"; arry[1] = "e"; arry[2] = "l"; arry[3] = "l"; arry[4] = "o"; arry[5] = "W"; arry[6] = "o"; arry[7] = "r"; arry[8] = "l"; arry[9] = "d"; end //使能数据更新位,获得串口数据更新的脉冲 assign send_en = (~send_d1) & send_d0; //数据更新标志,寄存两次uart_send_en的数据,为构成发送使能脉冲做准备 always @(posedge sys_clk or negedge sys_rst_n) begin if (!sys_rst_n) begin send_d0 <= 1'b0; send_d1 <= 1'b0; end else begin send_d0 <= uart_send_en; send_d1 <= send_d0; end end //串口发送字符串 always @(posedge sys_clk or negedge sys_rst_n) begin if (!sys_rst_n) begin uart_send_en <= 1'd0; //初始化串口发送使能 data_cnt <= 32'd0; //初始化数据计数器 uart_send_data <= arry[0]; //初始化首字符 string_end <= 1'd0; //控制字符串发送结束 end else begin //当串口处于空闲状态,且数据计数器小于10的时候 //条件:data_cnt < Data_Len 不要也可以 //条件必须满足TX空闲,字符串发送结束标志位0,可在此基础上添加其它条件 if((~uart_tx_busy) && (data_cnt < Data_Len) && (string_end == 1'b0)) begin //使能串口发送使能寄存器 uart_send_en <= 1'b1; end //当数据计数器大于等于字符串长度时 if(data_cnt == Data_Len) begin string_end <= 1'b1; uart_send_en <= 1'b0; //失能串口发送使能,停止串口发送数据 data_cnt <= 32'b0; end //如果数据发送使能脉冲到来 else if((send_en) && (data_cnt < Data_Len)) begin data_cnt <= data_cnt + 32'b1; //则数据计数器加一 end //如果串口有数据在发送,并且结束位没有拉高 else if((uart_tx_busy) && (string_end == 1'b0)) begin //则失能串口发送使能,为下一个数据的发送做准备 uart_send_en <= 1'b0; uart_send_data <= arry[data_cnt]; end end end //串口发送模块 uart_send #( .CLK_FREQ (CLK_FREQ), //设置系统时钟频率 .UART_BPS (UART_BPS)) //设置串口发送波特率 u_uart_send( .sys_clk (sys_clk), .sys_rst_n (sys_rst_n), .uart_en (uart_send_en), .uart_din (uart_send_data), .uart_tx_busy (uart_tx_busy), .uart_txd (uart_txd) ); //例化ILA IP核 //ila_0 your_instance_name ( // .clk(sys_clk), // input wire clk // // .probe0(uart_send_en), // input wire [0:0] probe0 // .probe1(data_cnt), // input wire [7:0] probe1 // .probe2(uart_tx_busy), // input wire [0:0] probe2 // .probe3(send_d0), // .probe4(send_d1), // .probe5(send_en), // .probe6(uart_send_data), // .probe7(string_end) //); endmodule
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
进一步的改进
如果要发送多个字符串,可以在更新字符串数据时加入状态机,进行不同字符串的转换。

