
热门标签
热门文章
- 1Java进阶(四十四)IO流12:NIO.2中Path、Paths、Files类的使用_paths.get().toabsolutepath.normalize().tostring
- 2MongoDB的数据库导入和导出_mongodb数据库怎么导入到其它软件
- 3南京江宁元宇宙高峰论坛举办 元宇宙产业委加速元宇宙共识圈形成_院士 元宇宙 论坛
- 4如何在Java中操作Redis_java中redis的使用1
- 5Redis面试知识点
- 6MongoDB导入导出及备份还原常用命令解释汇总_mongodb集群怎么转存和还原
- 7[oeasy]教您玩转python - 0003 - 编写 py 文件_oeasy.python3.py免费自学网站官网
- 8linux文件系统介绍
- 9基于spaCy的命名实体识别_spacy中文人名识别模型
- 10探索微软的《AI for Beginners》:开启人工智能之旅
当前位置: article > 正文
10.Moveit+gazebo仿真_ros noetic进行moveit+gazebo仿真
作者:秋刀鱼在做梦 | 2024-07-13 09:22:56
赞
踩
ros noetic进行moveit+gazebo仿真
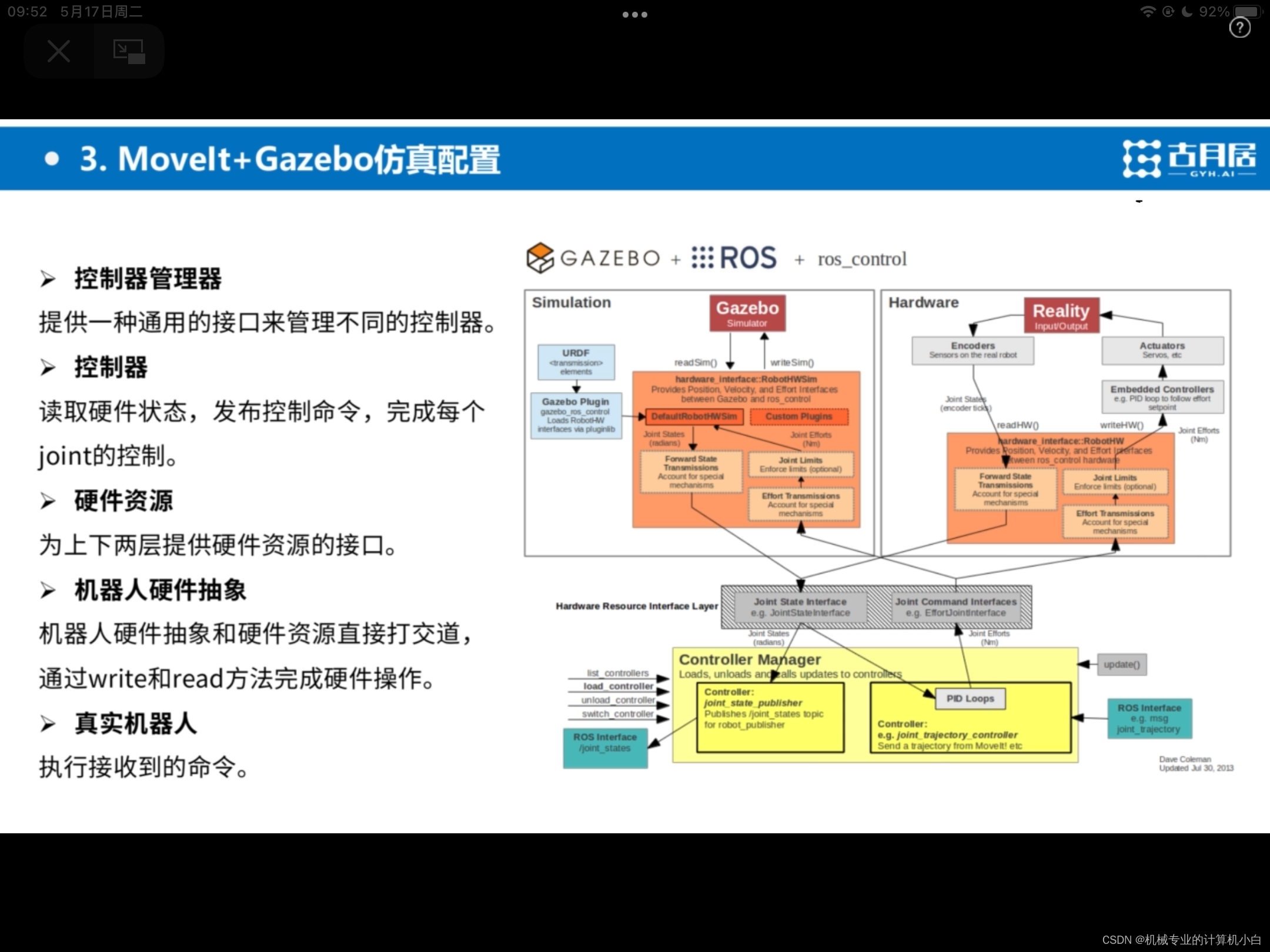
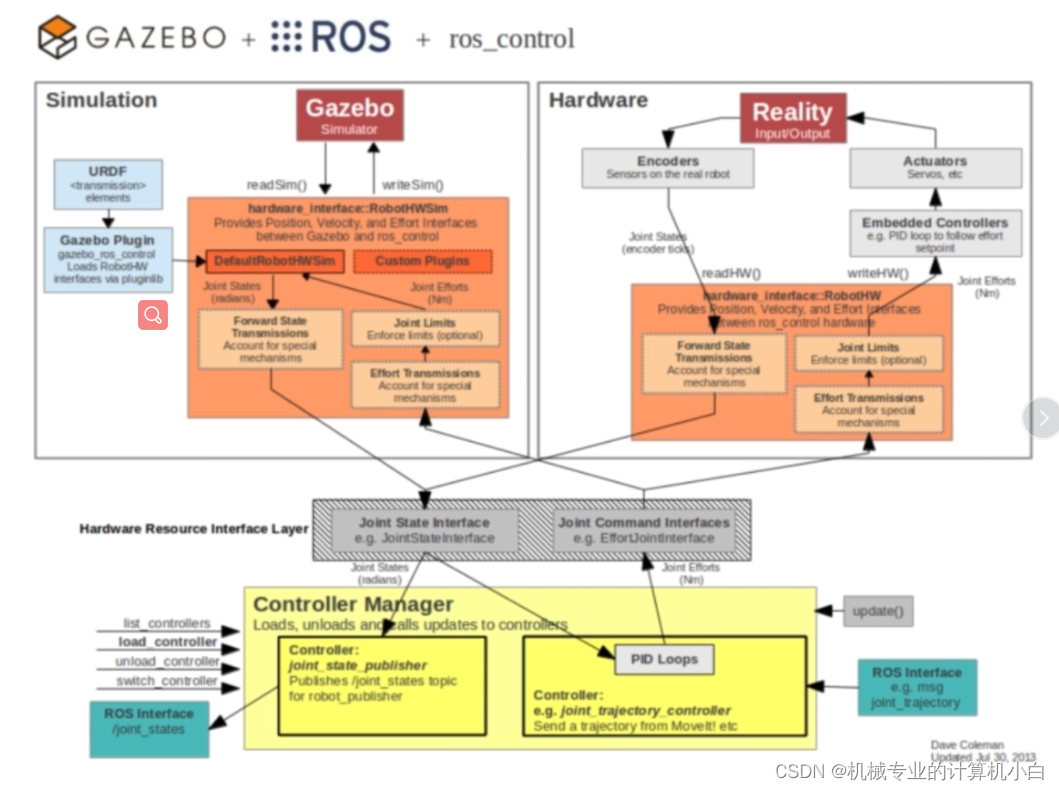


注意三个控制器关系,Follow Joint Trajectory发布轨迹,Joint Trajectory Controller接收轨迹,Joint State Controller反馈关节位置。
一、c800
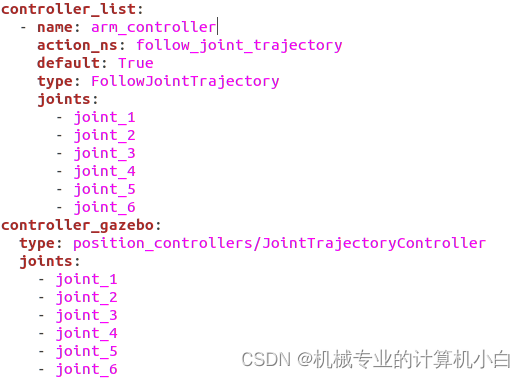
1.进入ros_controllers.yaml,将命名空间对应好,要不无法接收。
修改前,controller_gazebo是名字是自动生成的:
修改后:
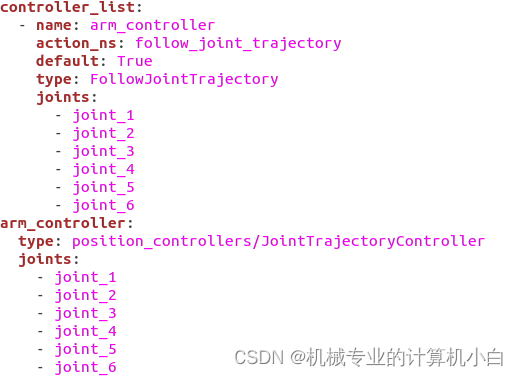
目的是解决,二者的对接问题:

2.进入ros_controllers.launch,把控制器接口加入进去
修改前:

里面是controller_manager,旗下是controller_gazebo,在上一步已经改名,而且对应下图还缺少joint_state_controller

修改后:

复制想要的controller,加入
3.启动gazebo
roslaunch c800_moveit_config demo_gazebo.launch 



config名字要对应上要不报错。
结果:
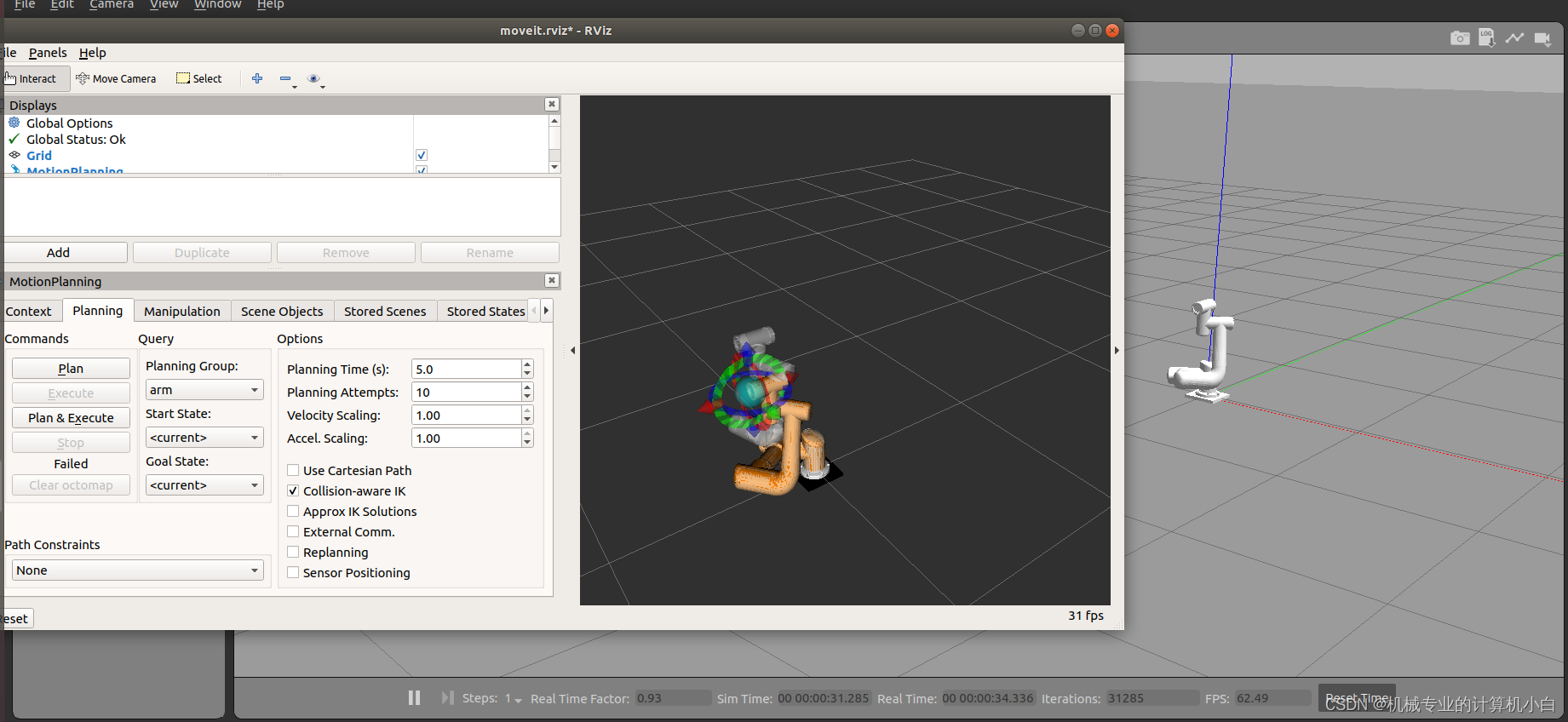
二、marm
一样的步骤,只不过要把手抓的controller也要加进去。

此处出现了由于自己的问题出现了命名空间的问题。

通过避障实践,发现相机的点云处理是实时的,同时通过实时产生的点云进行避障,而且之前点云未改变时也有障碍物的效果。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/秋刀鱼在做梦/article/detail/818788
推荐阅读
相关标签

