
热门标签
热门文章
- 1Python 打包配置文件 setup.py 详解_python 中setup.py在哪
- 2【云原生 | 从零开始学istio】二、Istio核心特性与架构
- 3unity karting导入时的编译问题_all compiler errors have to be
- 4小程序实现无限级树形菜单_小程序 树菜单
- 5“IT小百科”之“Windows自带的服务和系统进程详解”_windows服务 打开exef进程
- 6DRF学习之权限验证(十五)_permission_classes=[isauthenticated]
- 7分布式事务概念及理论
- 8#每日一题# 25. K 个一组翻转链表 - 20191021_给你一个链表,每 k 个节点一组进行翻转,请你返回翻转后的链表。 k 是一个正整数,
- 9开源大型语言模型概览:多语种支持与中文专注
- 10Unity pc端内嵌网页插件Embedded Browser基本使用流程(转载)
当前位置: article > 正文
matlab 并联机械臂_机械臂末端工具TCP位置标定与TCF姿态标定算法(matlab)
作者:笔触狂放9 | 2024-02-16 21:07:01
赞
踩
tcp 标定流程 几何法
本菜,只是简单复现基础框架,也就是简单好用的算法,帮大家入个门,其他复杂优化算法希望大家自己学习哈
理论公式和python版本去古月居可看到
机械臂——工具标定www.guyuehome.com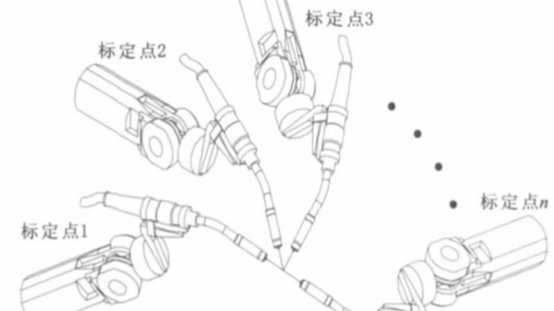
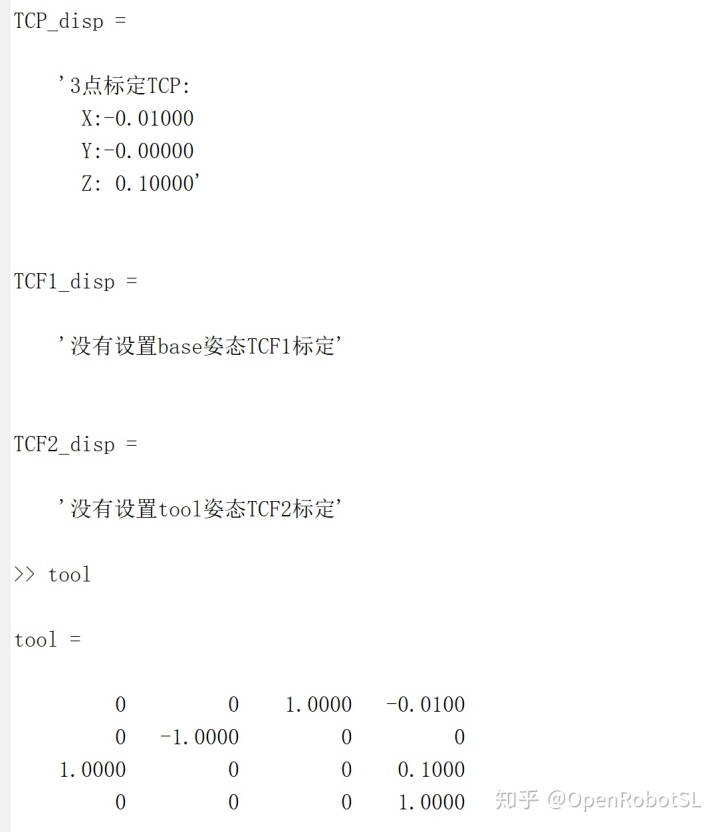
本算法支持多点标定>=3,和两种姿态标定方法,都有注释哈,适用于不同情况的姿态标定法。验证图:tool是真实末端坐标系来验证。 分别测试单独标定TCP 3点法。 3点标定TCP TCF1;5点标定TCP TCF2;
由于我的输入格式比较复杂,大家拆分出标定部分可以单独测试哈哈哈哈
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/笔触狂放9/article/detail/96647
推荐阅读
相关标签

