
热门标签
热门文章
- 1使用idea 把一个git分支的部分提交记录合并到另一个git分支上_idea 将一部分提交同步到其他项目
- 2【OpenCV】给图像添加噪声_翻转,切割,增加噪声
- 3python批量命名教程_《自拍教程69》Python 批量重命名音频文件,AV专家必备!
- 4四年背的单词 笔记目录_119.23.244.79:8081/topic/frame/race/login.html
- 5pip安装pandas
- 6Kafka:什么是kafka? ①_kafka kafka
- 7Linux如何创建文件在指定的目录?_在指定目录下创建文件
- 8Unity_VRTK 3.2.1_UI手柄射线检测点击事件的问题_unity htc vrtk 射线 点击ui
- 9YOLOV5源码的详细解读_yolov5代码详解
- 10资深SRE带你看阿里云香港故障_sre故障复盘需要关注的问题
当前位置: article > 正文
KITTI数据集转为LVI-SAM使用格式_lvi-sam lvi-sam在kitti数据集
作者:繁依Fanyi0 | 2024-02-19 20:13:42
赞
踩
lvi-sam lvi-sam在kitti数据集
KITTI数据集转为LVI-SAM使用格式
KITTI数据集介绍
下载:
真值:Download odometry ground truth poses (4 MB)
标定参数(以及时间戳):Download odometry data set (calibration files, 1 MB)
- 1
- 2
- 3
真值
标定参数
raw data
下载有gt的raw data:
下载参考链接地址
raw data与真值之间的对应关系
| 真值 | raw data |
|---|---|
| 00 | 2011_10_03_0027 |
| 01 | 2011_10_03_0042 |
| 02 | 2011_10_03_0034 |
| 03 | 2011_09_26_0067 |
| 04 | 2011_09_30_0016 |
| 05 | 2011_09_30_0018 |
| 06 | 2011_09_30_0020 |
| 07 | 2011_09_30_0027 |
| 08 | 2011_09_30_0028 |
| 09 | 2011_09_30_0033 |
| 10 | 2011_09_30_0034 |
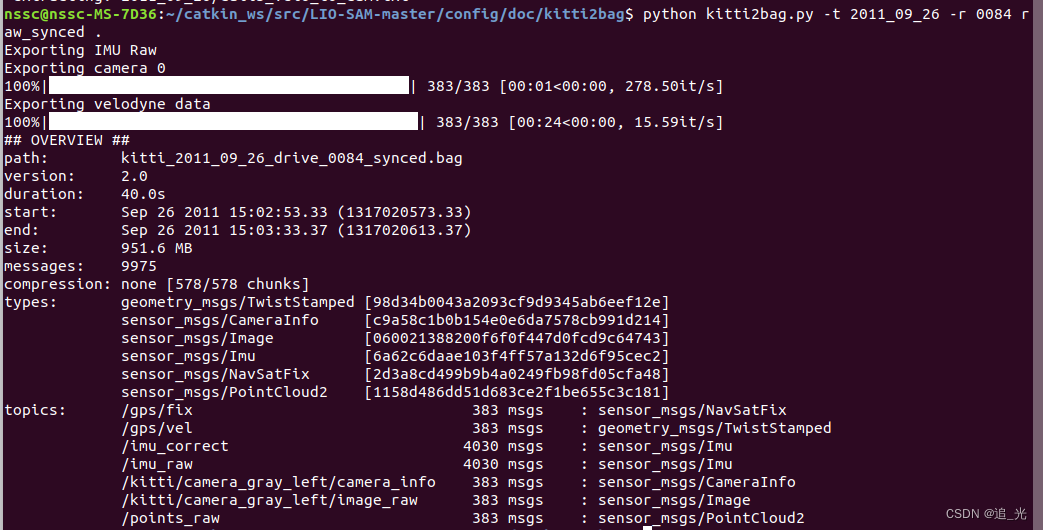
KITTI数据集转为bag
LIO-SAM中有config/doc/kitti2bag.py的工具文件,可以获得100Hz的IMU数据
示例代码
cd data
wget https://s3.eu-central-1.amazonaws.com/avg-kitti/raw_data/2011_09_26_drive_0084/2011_09_26_drive_0084_sync.zip
wget https://s3.eu-central-1.amazonaws.com/avg-kitti/raw_data/2011_09_26_drive_0084/2011_09_26_drive_0084_extract.zip
wget https://s3.eu-central-1.amazonaws.com/avg-kitti/raw_data/2011_09_26_calib.zip
unzip 2011_09_26_drive_0084_sync.zip
unzip 2011_09_26_drive_0084_extract.zip
unzip 2011_09_26_calib.zip
python kitti2bag.py -t 2011_09_26 -r 0084 raw_synced .
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
会在对应data文件夹下生成bag文件
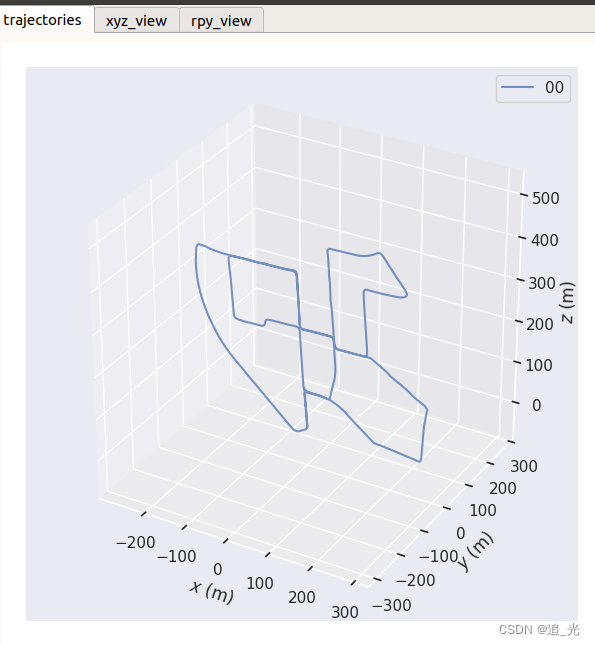
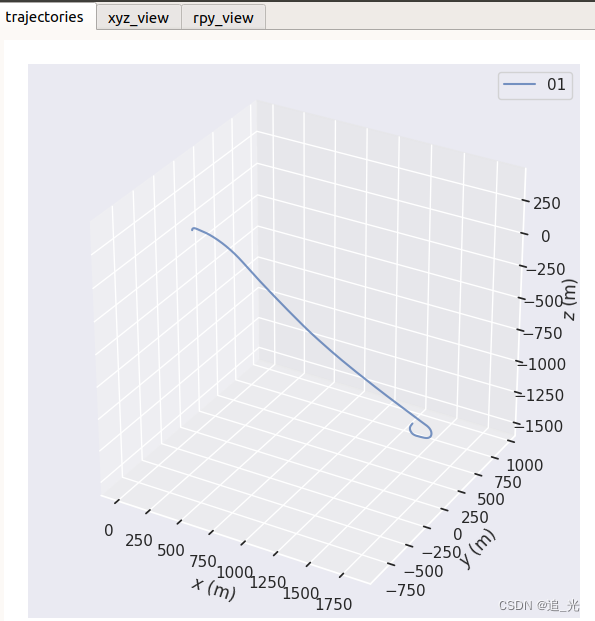
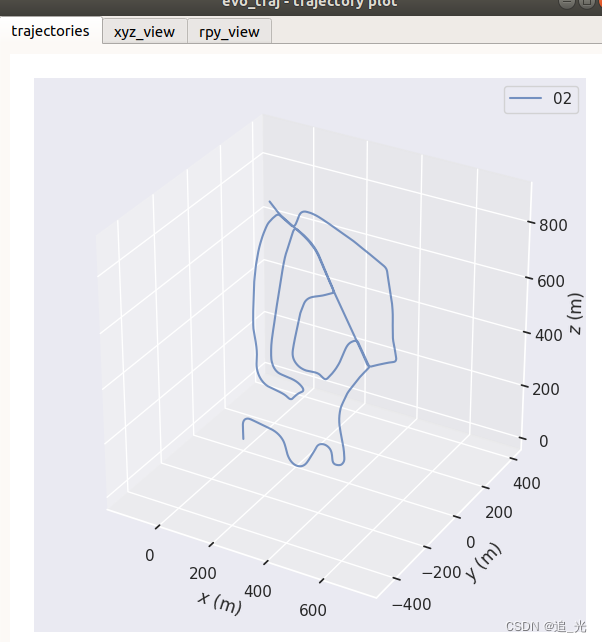
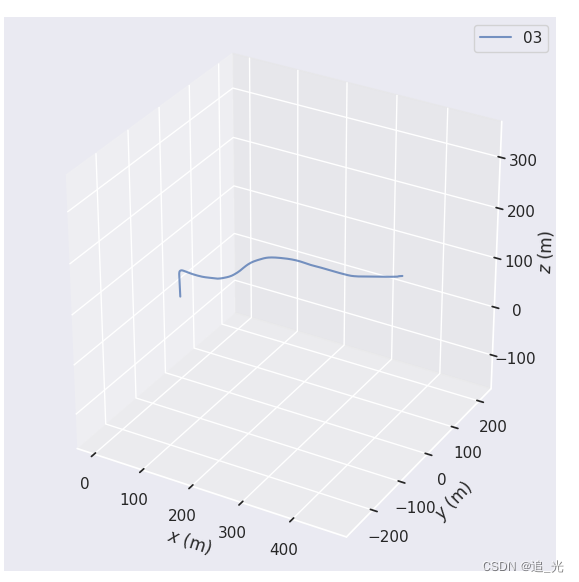
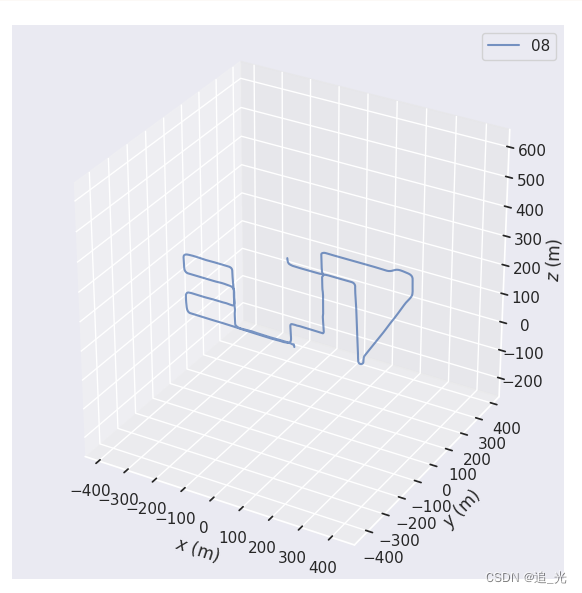
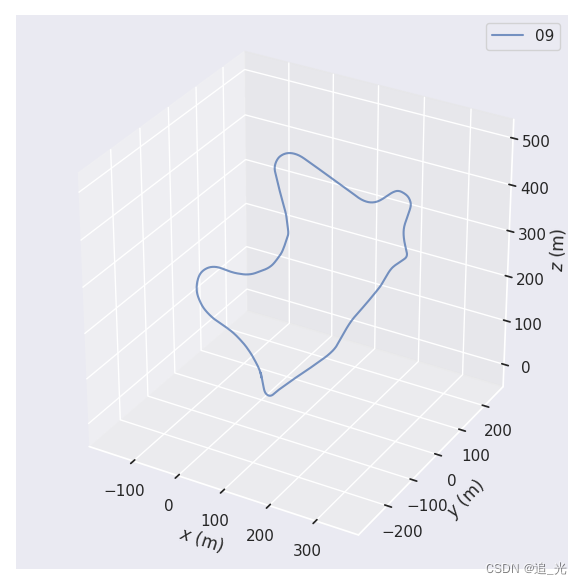
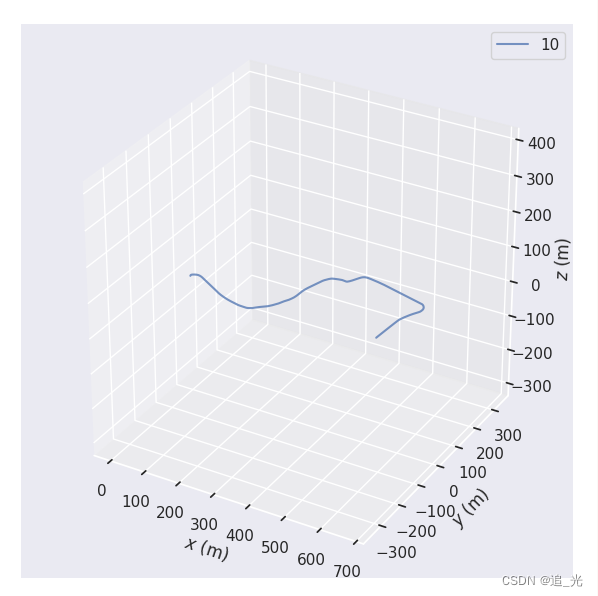
序列00-10的轨迹图
00

01

02

03

04

05

06

07

08

09

10

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/繁依Fanyi0/article/detail/116618
推荐阅读
相关标签

