
热门标签
热门文章
- 1【Morgan Stanley】AC面试_morgan stanley 实习 ac
- 2android 科大讯飞语音唤醒的使用_android 科大讯飞黑屏的情况下能够唤醒
- 310_Scala控制抽象*了解
- 4PyTorch 中的 ModuleList 和 Sequential: 区别和使用场景
- 5PHP简易开发的问卷调查系统_php 问卷调查系统
- 6VUE实现大文件分片上传与断点续传到七牛云
- 7基于ElasticSearch-7.9.2-实现京东搜索关键字高亮_es实现类似京东的 搜索框 输入关键字出现匹配的内容高亮显示,并且聚合统计数量
- 8【实战】Pytorch BiLSTM + CRF做NER
- 9经典Hive-SQL面试题及答案_uv和每个店铺访问量top3信息有50w个京东店铺,每个顾客访客访问任何一个店铺的任何
- 10SpringBoot2学习笔记_guice 拦截器 拦截letture对象
当前位置: article > 正文
基于Matlab的无人船局部避碰算法仿真平台
作者:花生_TL007 | 2024-05-06 21:16:38
赞
踩
基于Matlab的无人船局部避碰算法仿真平台
无人船动态自主避碰能够根据传感器数据,对周围环境中的突发或高速障碍物进行快速规避,以确保无人船在航行过程中的安全。常用的动态自主避碰算法有人工势场法、动态窗口法、速度障碍法、向量场直方图法等。现有的避碰算法还存在如下几个问题:
(1)算法未结合国际海上避碰规则,导致避碰失败或二次事故。
(2)算法未考虑无人船的操纵特性,导致规划出的避碰路径难以运用于无人船的实际航行中。
(3)算法计算量大,无法实现高速无人船在复杂海况下的快速避碰。
如果都用实船验证算法费时费力,成本十分高昂。此外,无人船航行过程中环境局部障碍可能非常多变,搭建符合要求的局部障碍也很复杂。因此,考虑采用Matlab搭建无人船局部避碰算法仿真平台。
一、界面
在Matlab环境下打开主程序,点击运行按钮
即会弹出如下窗口
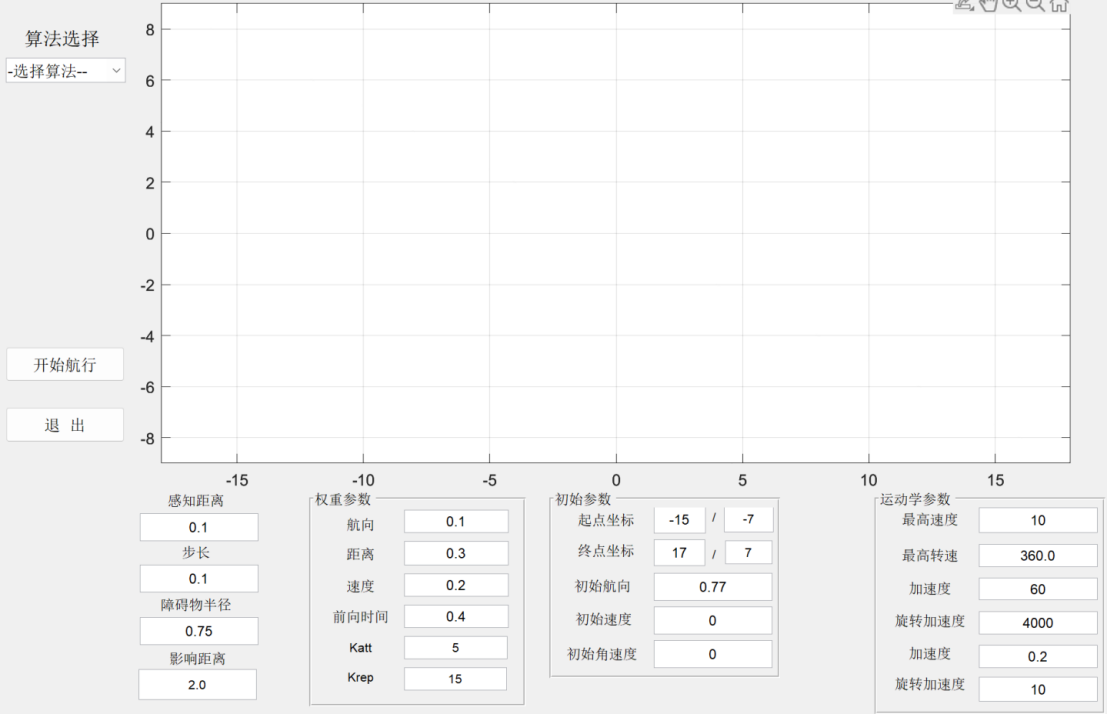
窗口可对运行算法进行设置,包括“算法选择”、“步长设置”,确认后,点击“开始航行”即可进入避碰算法仿真运行环境。“算法选择”包括如下内容:

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/花生_TL007/article/detail/545953
推荐阅读
相关标签

