
热门标签
热门文章
- 1《Python编程从入门到实践》day19
- 2Hadoop(2.6.0-cdh5.15.1)配置lzo压缩_hadoop-lzo包
- 3Node.js网络编程之WebSocket篇_node websocket
- 4机器人路径规划:基于改进型A*算法的机器人路径规划(提供Python代码)_a*算法多机器人路径规划
- 5搭建数据可视化工具:superset_sqlalchemy.exc.invalidrequesterror: can't determin
- 6RabbitMQ之二-Web管理界面_rabbitmq web查看数据
- 7git克隆及 配置ssh_git clone ssh://
- 8window环境安装kafka_kafka window
- 9mysql-sql-练习题-2
- 10Git进阶系列 | 7. Git中的Cherry-pick提交_git cherry
当前位置: article > 正文
Simpro4.1环境下实现KUKA机器人与末端执行器联动仿真_kuka sim 4.1
作者:2023面试高手 | 2024-04-29 23:09:40
赞
踩
kuka sim 4.1
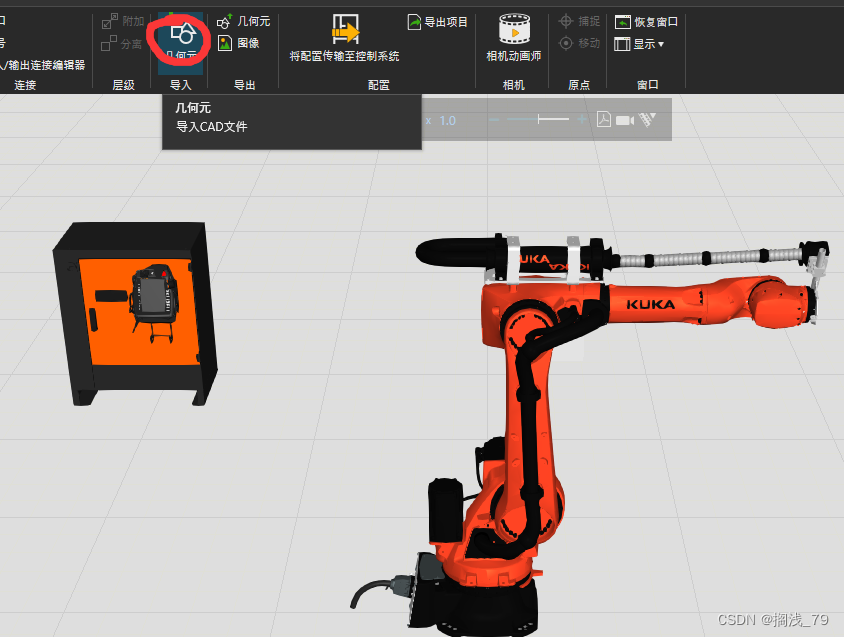
1.导入模块
导入机器人与控制柜模块,再导入夹具末端,(夹具文件,提取码:s4k2.路径:\39062源文件\39062源文件\3D模型文件\夹具工具.IGS)
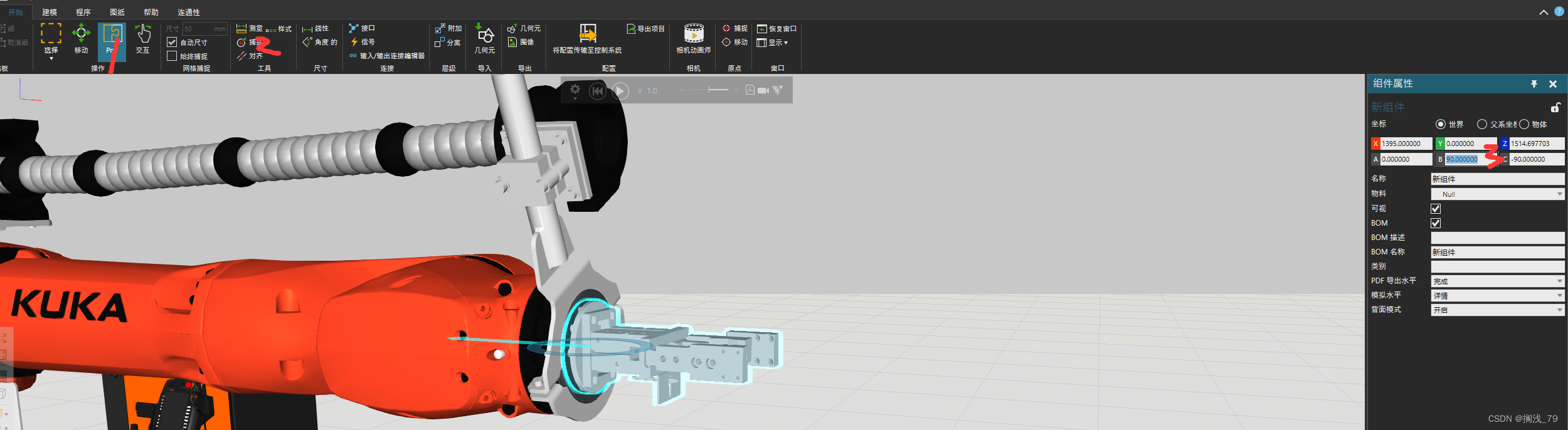
在开始界面下选中夹具,选择:开始>操作>PnP,点击“工具>捕捉”将夹具固定在机器人末端法兰面,设置角度对齐。
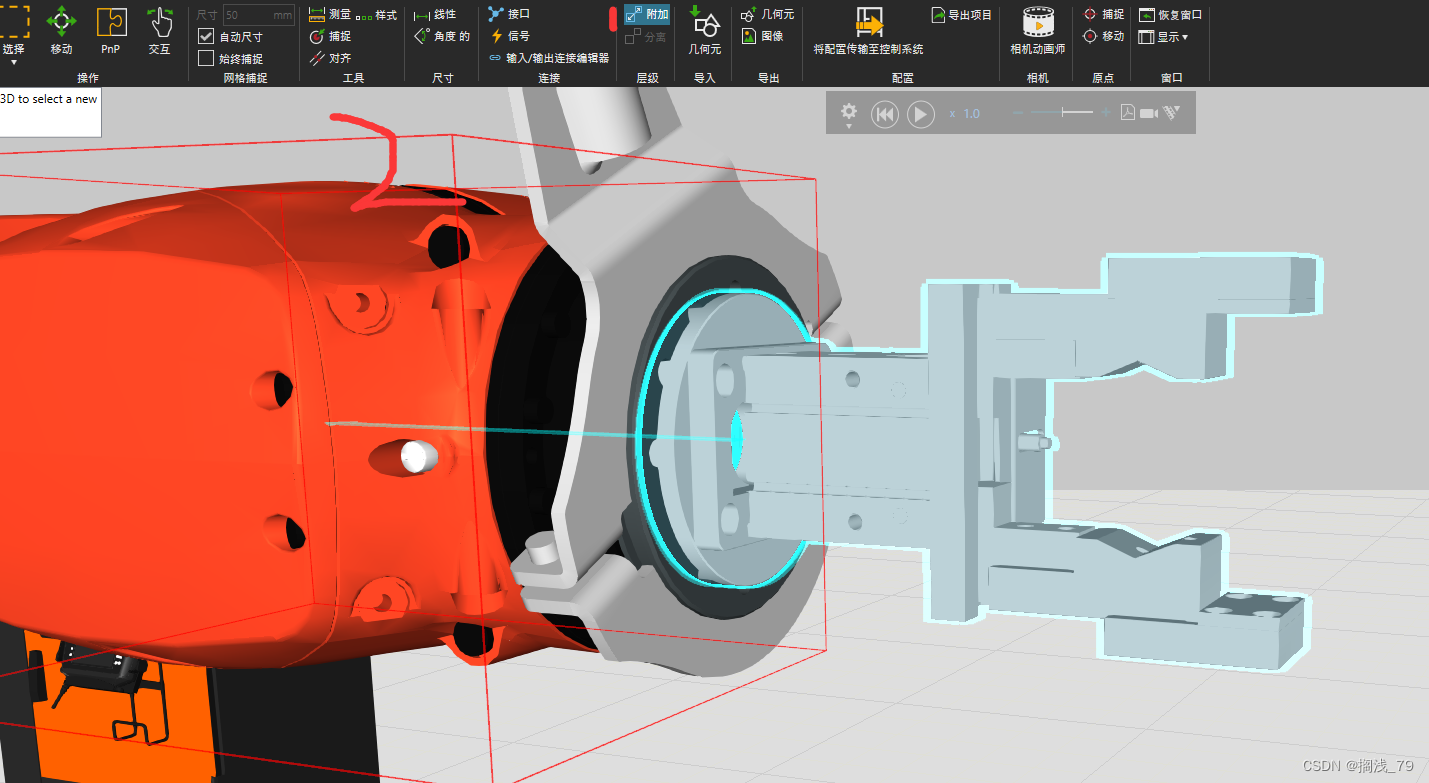
点击“层级>附加”,将夹具与A6轴绑定。此时夹具能跟随机器人运动。
2.配置夹具
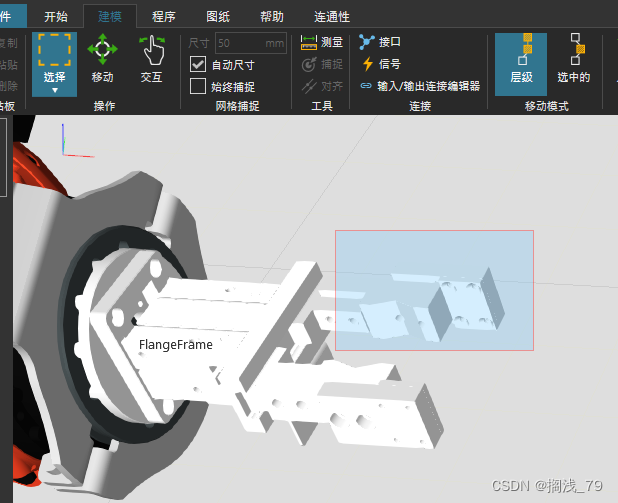
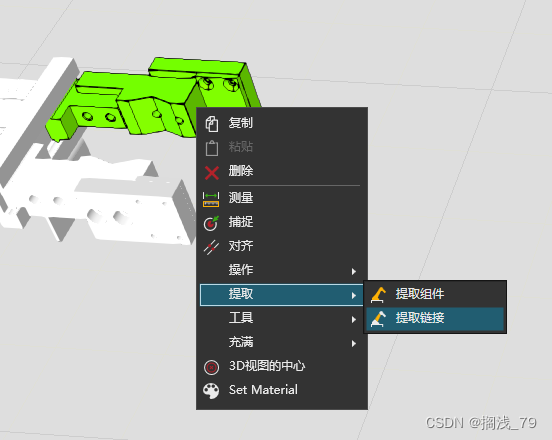
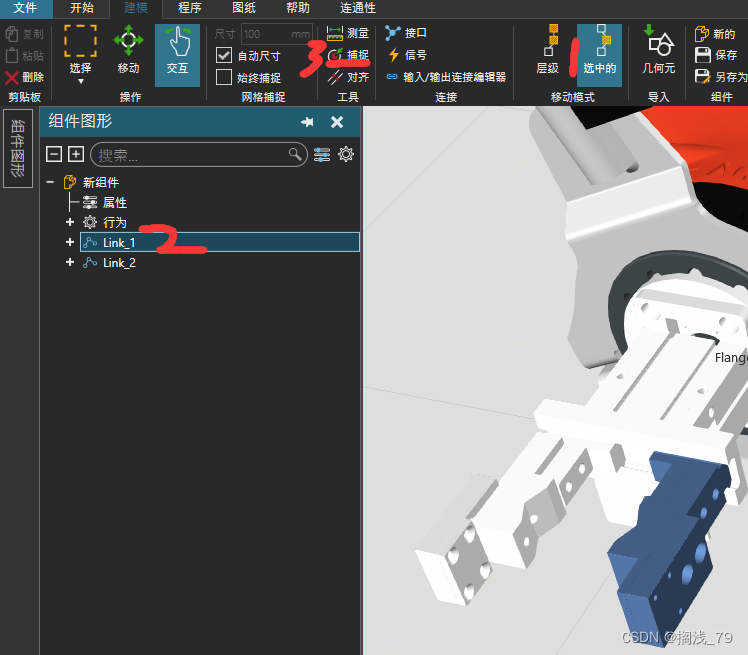
建模>操作>选择,选中夹具爪一边,右击选择“提取链接”。
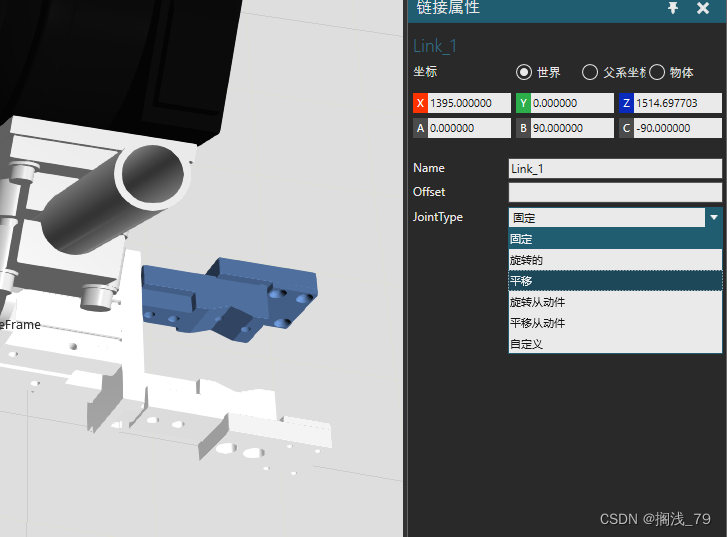
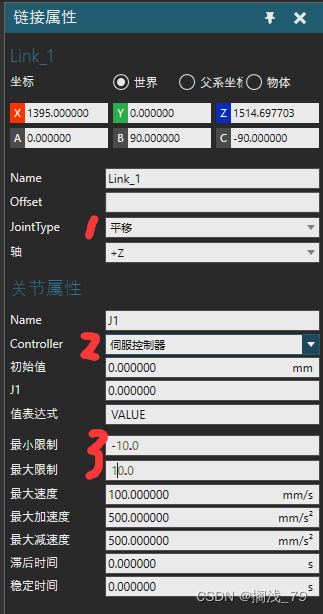
在链接属性选择平移,设置伺服控制器和移动限制范围
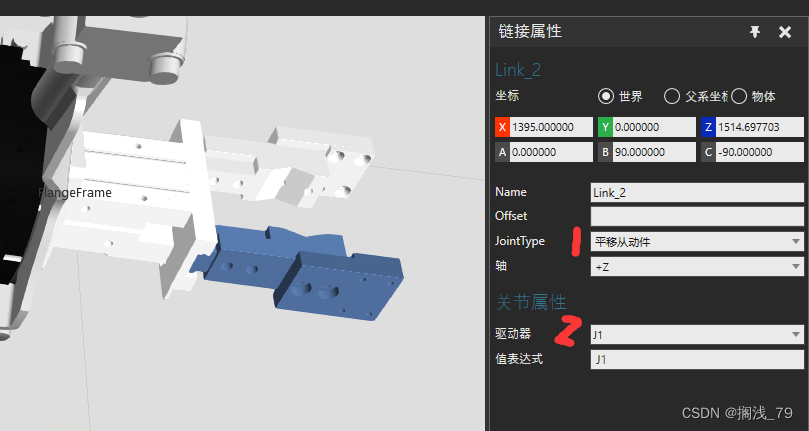
夹具爪另一边同样的设置,不同的是要选中“平移传动件”,驱动器是刚才设置的J1。
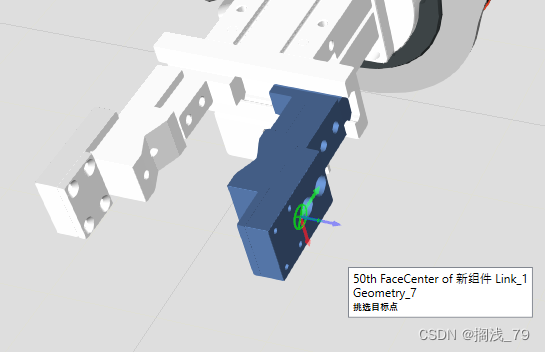
依此点击下图:,捕捉夹具一边的坐标原点(对应link1)。夹具另一边的原点设置步骤完全一致,(对应link2)。此时在“交互”界面选中情况下鼠标拖动夹具一边,夹具另一边跟着动。
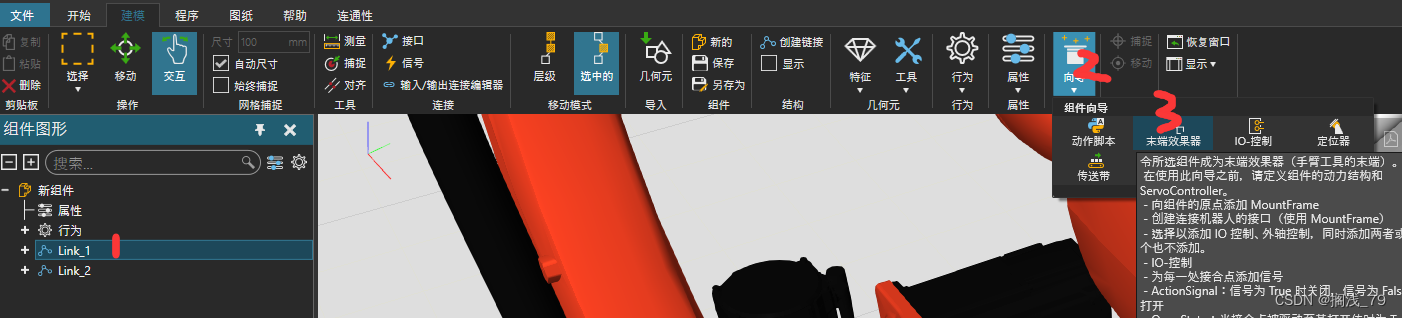
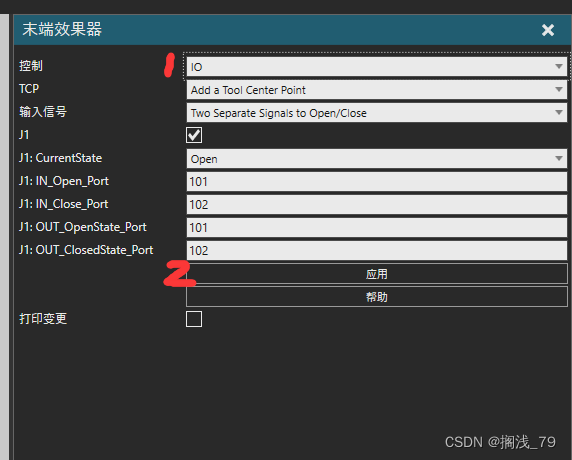
随后配置IO控制夹具。选择link1:,末端效果器中选择“IO”,默认J1的开、关是两个信号(101、102)控制的。点击应用。
此时组件图形显示:
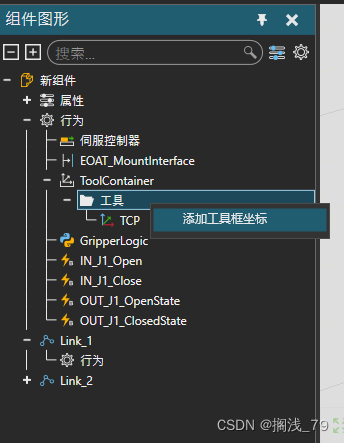
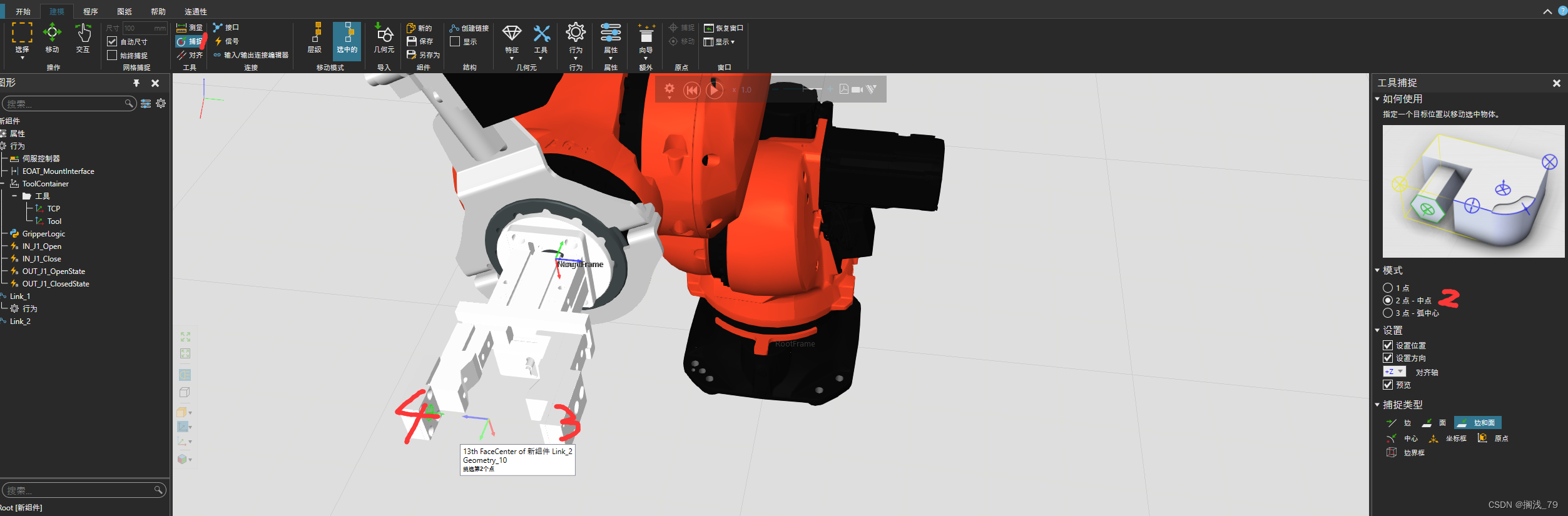
右击工具填加坐标系Tool。选中这个新添加的Tool,点击捕捉,选择“2点”,依此点击夹具两边,确定坐标原点在两爪子的中间。
点击“组件图形”的“EOAT_MountInterface”,依次选择:
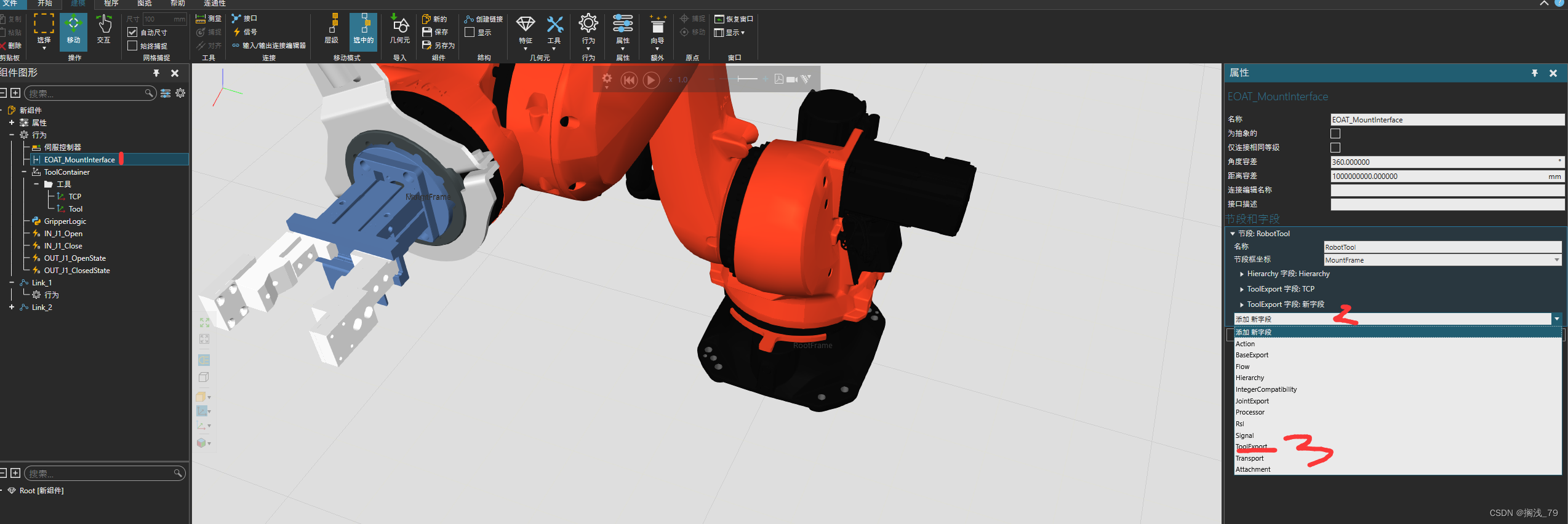
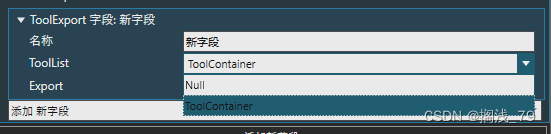
在Export选择ToolContainer
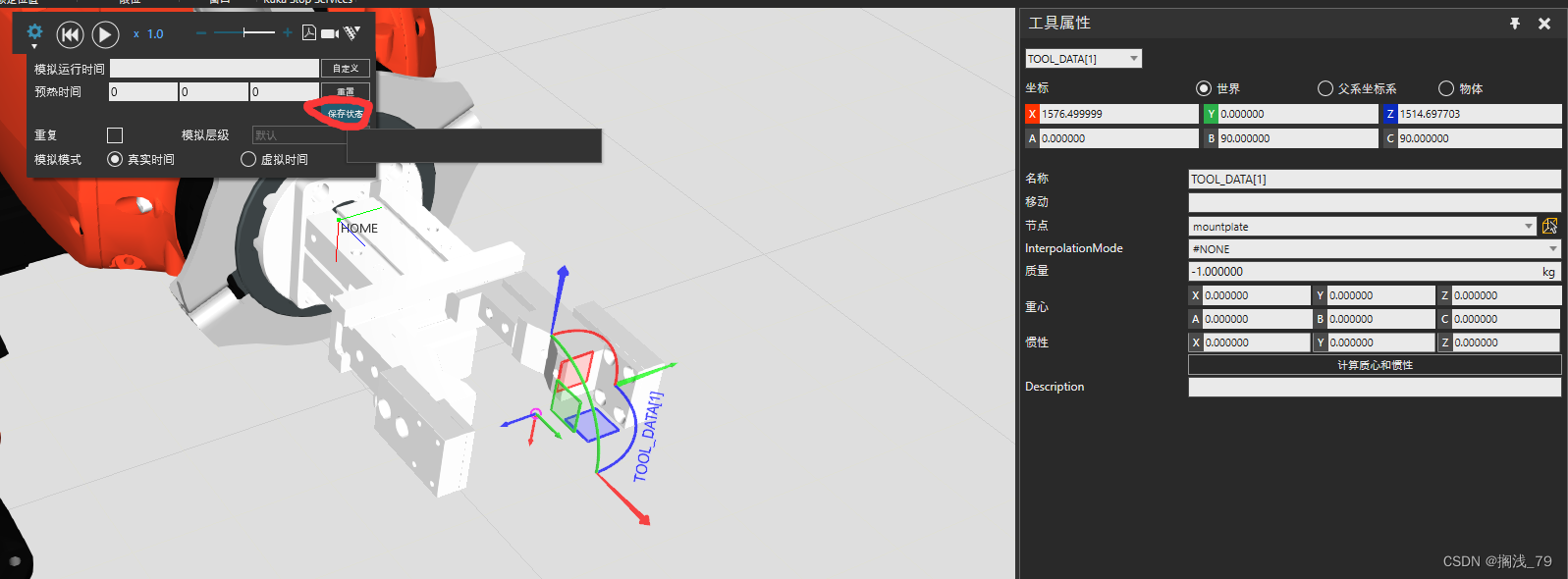
配置工具坐标系:
点击齿轮后,捕捉,确定工具坐标系。最后点击保存状态。
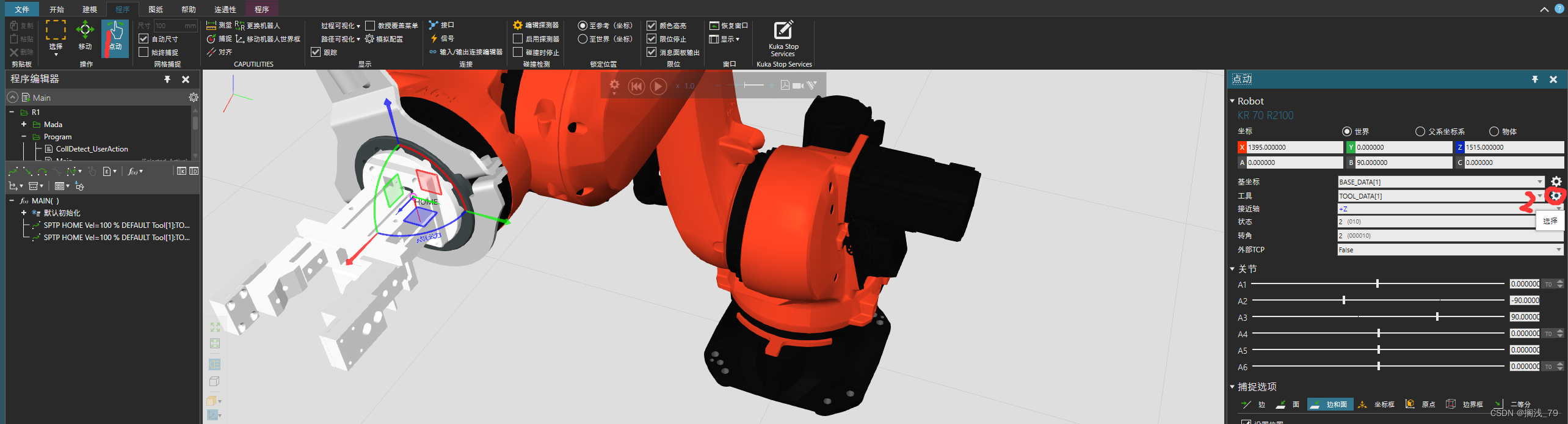
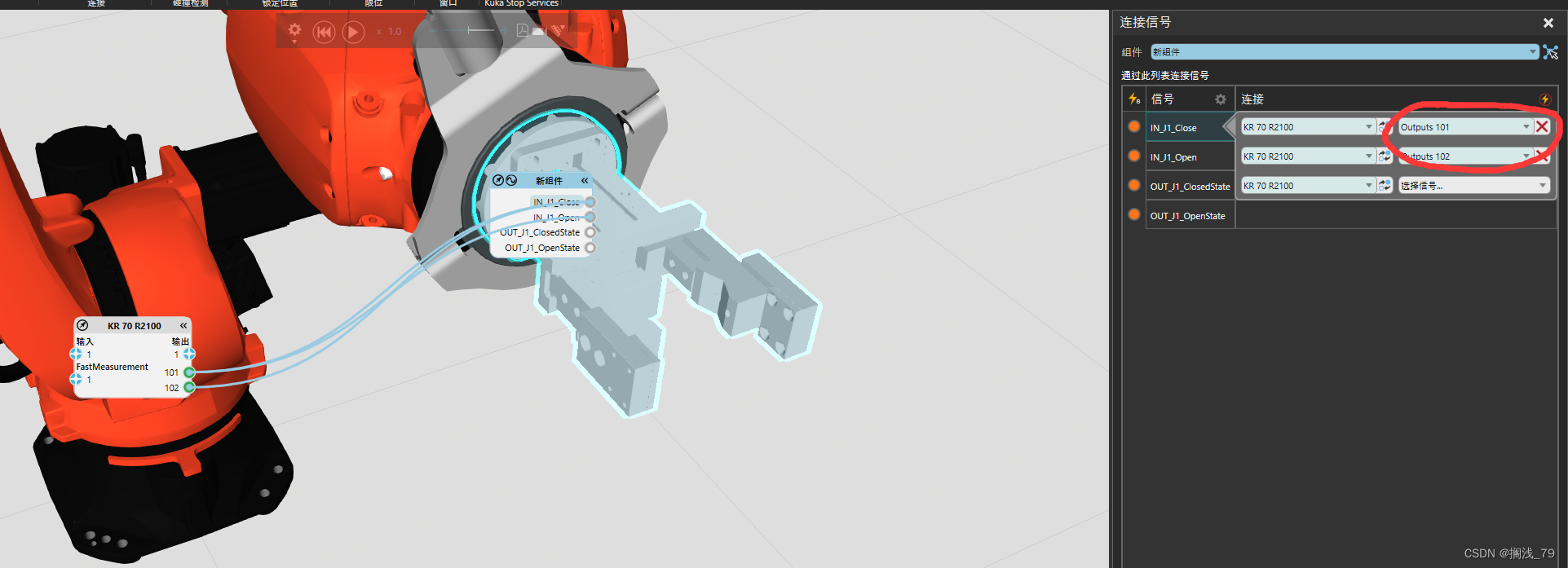
3.夹具与机器人通信连接
在“程序”下点击“信号”,会弹出信号框,在“连接信号”设置机器人的输出口。
点击机器人,在“组件属性”配置:
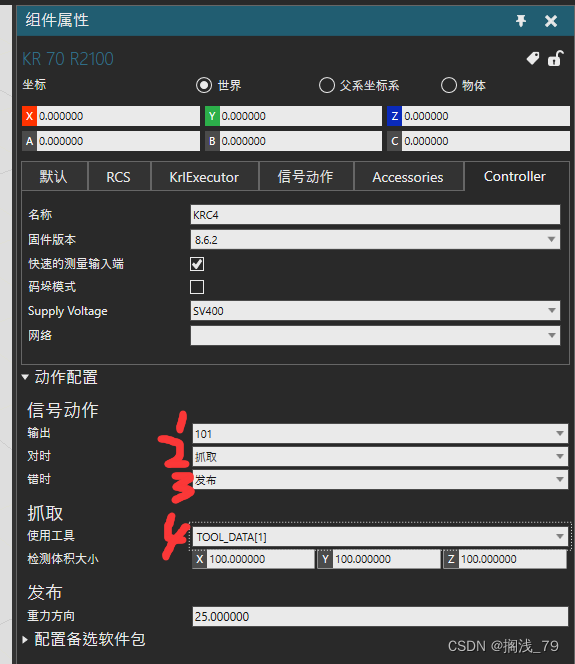
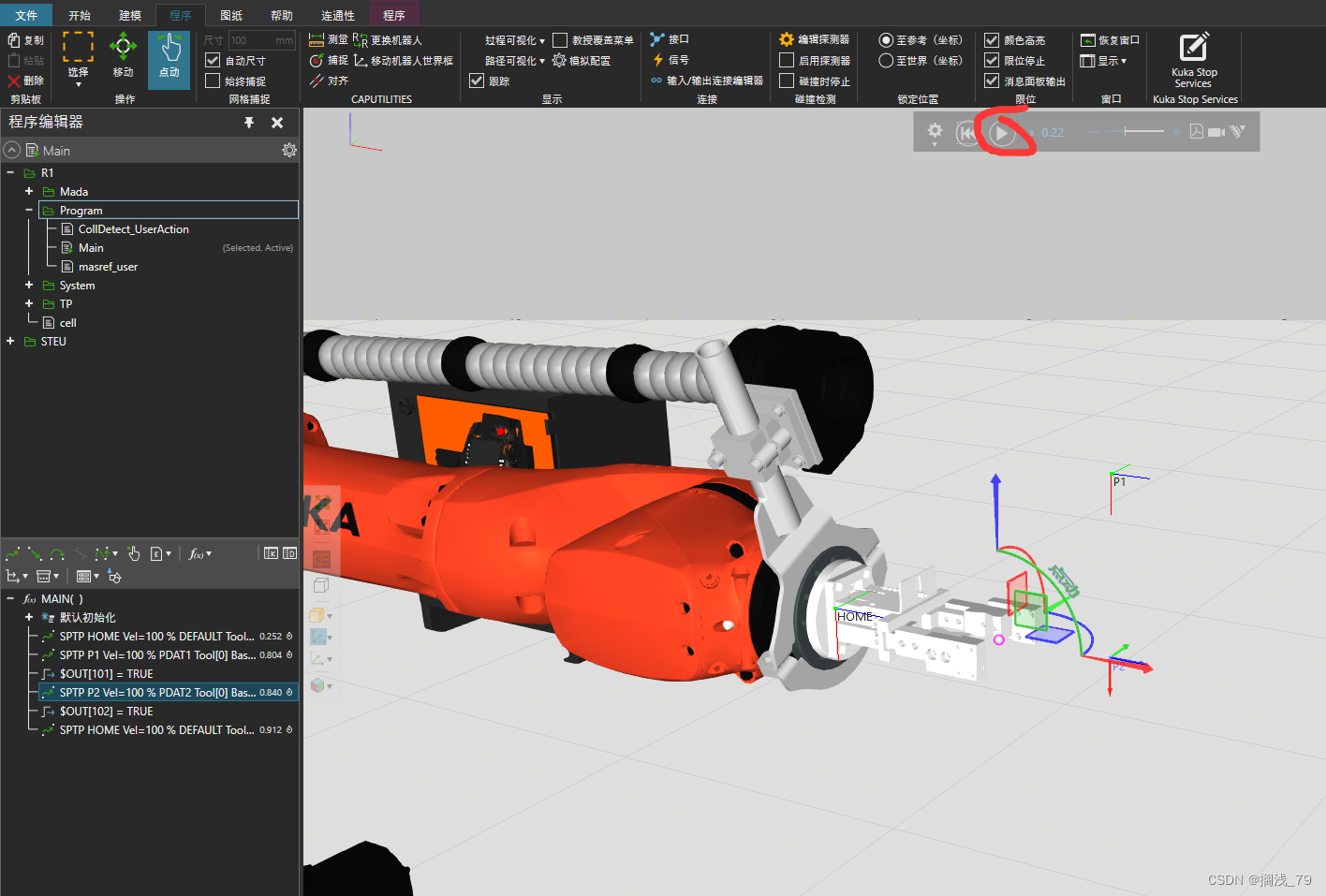
开始写程序,拖动夹具在不同位置,设置运动指令,点击运行
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/2023面试高手/article/detail/510255
推荐阅读
相关标签

