
KUKA Simpro 3.0.3-第2弹(导入直线运动模块创建运动单元)_onetooneinterface
赞
踩
Linear units直线运动模块创建
1. 导入linear units组件
a、导入事先准备的STP格式(或其它格式)的数模,导入步骤见图:
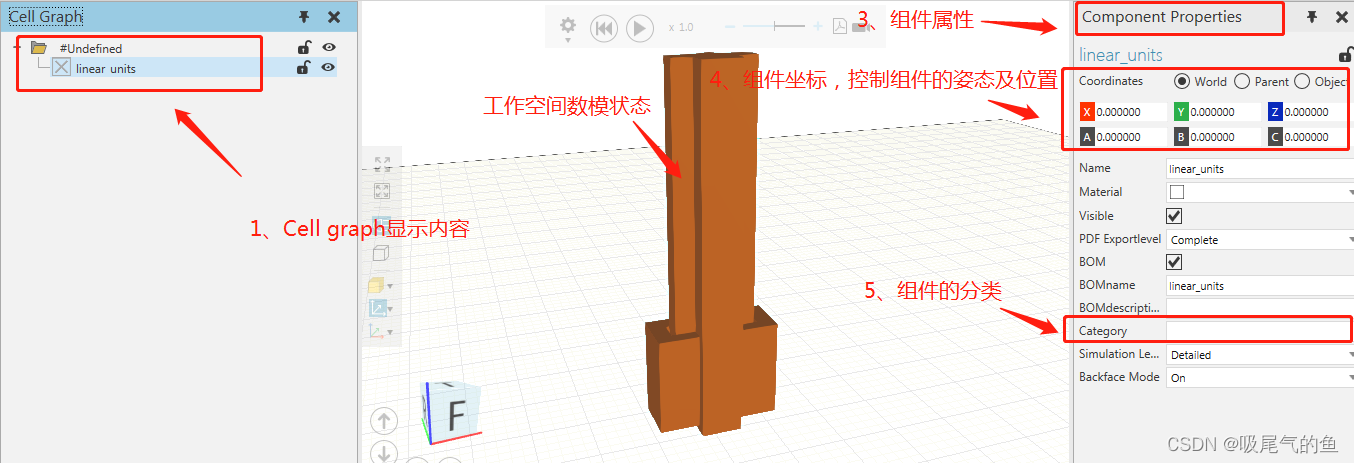
b、Component properties——Category——Linear units——完成分类;
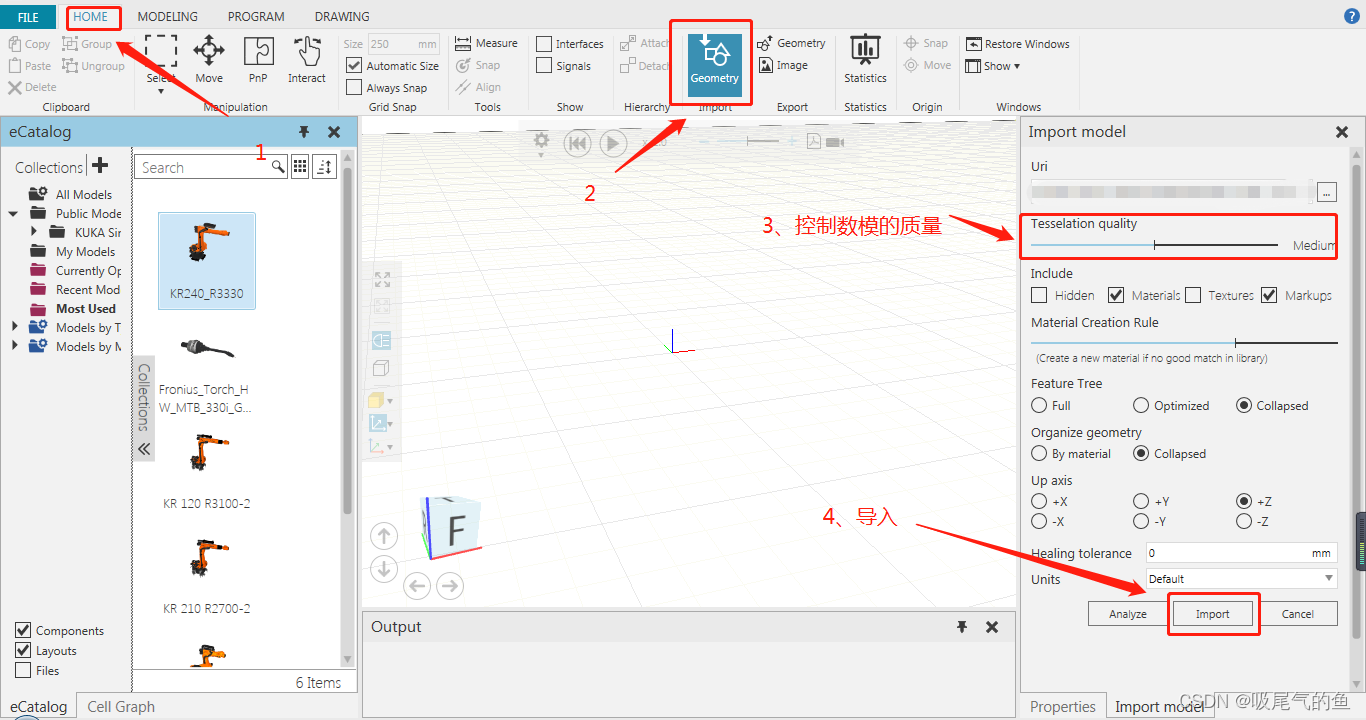
导入模型见下图:
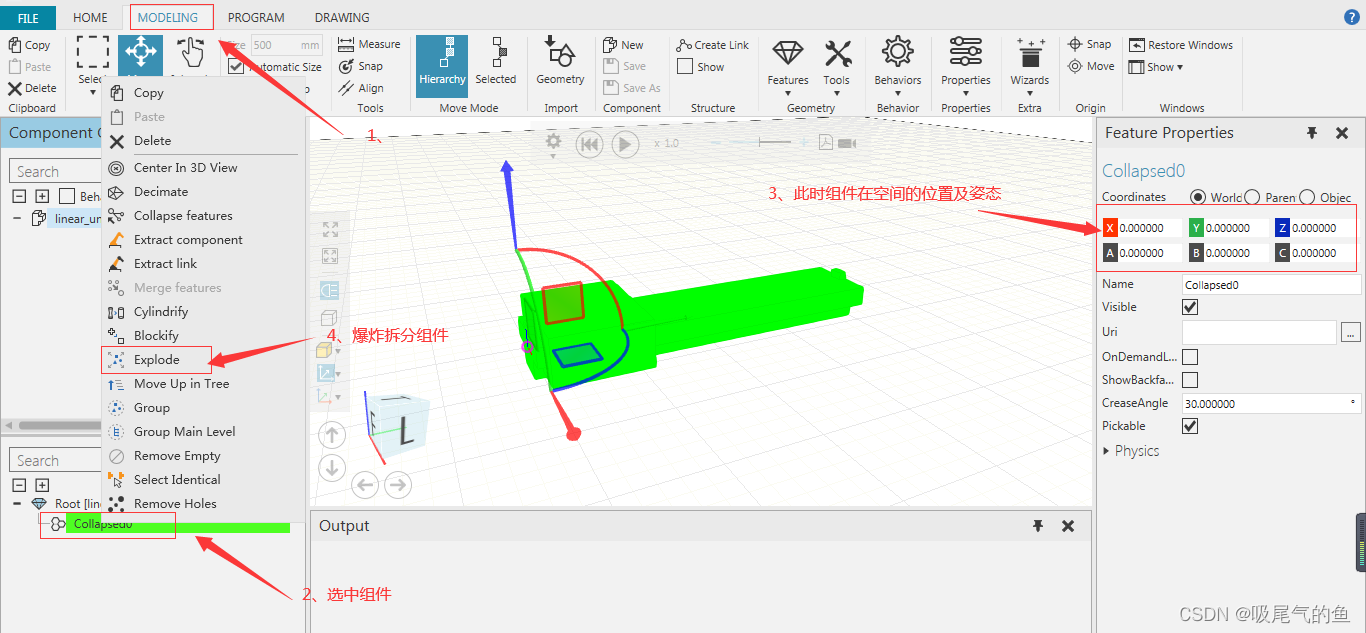
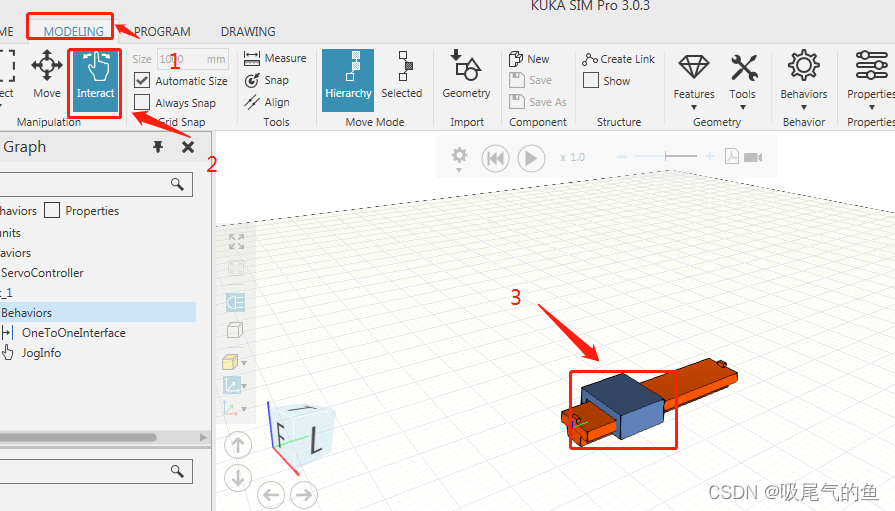
2. 拆分组件
a、Home——Cell Graph——linear units——选中要修改的组件(或鼠标单击工作空间);
b、MODELING——Root——Collapsed——修改组件坐标系动作(见下图)
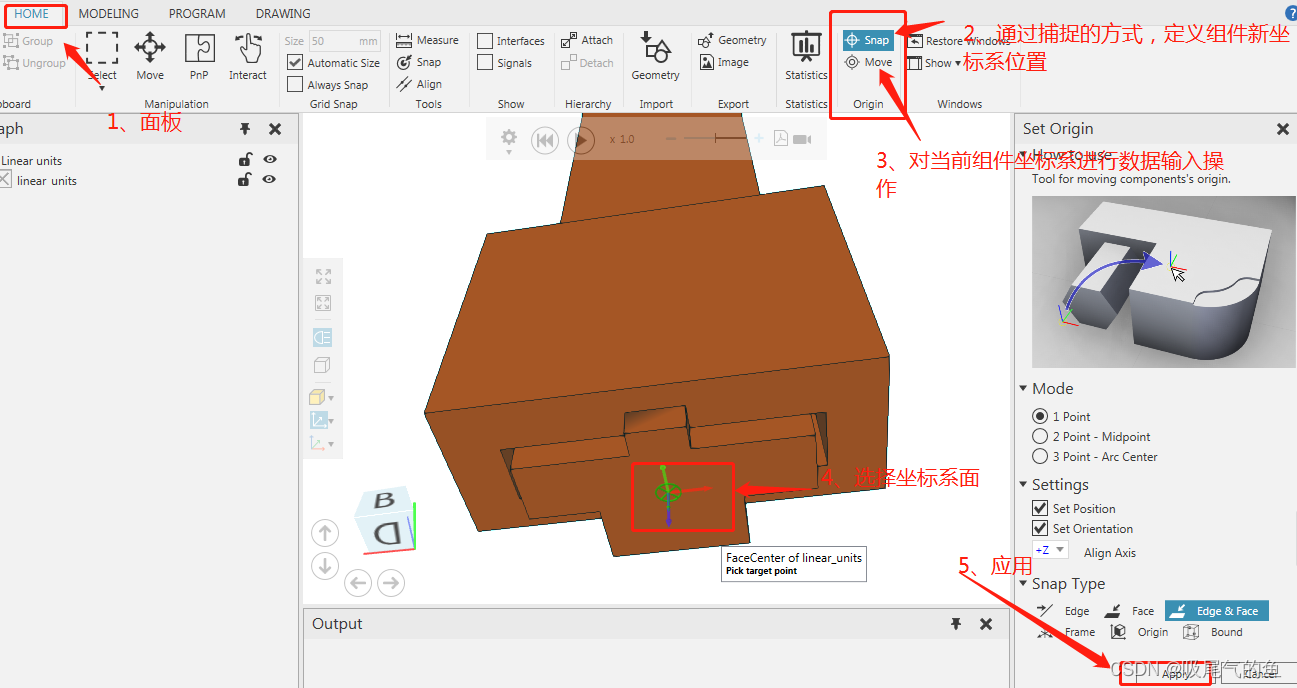
b.1、捕捉linear units组建的坐标系,并新建:
Home——Origin——Snap——Shift+鼠标指向——捕捉要选择的面——应用后——完成组件新坐标系的创建;
(详细快捷键见)
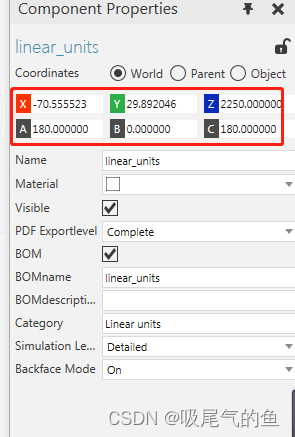
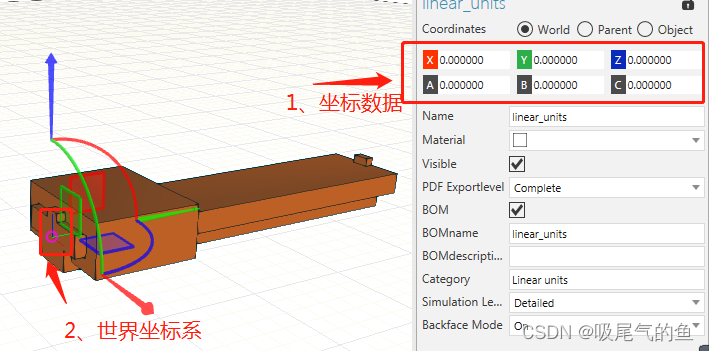
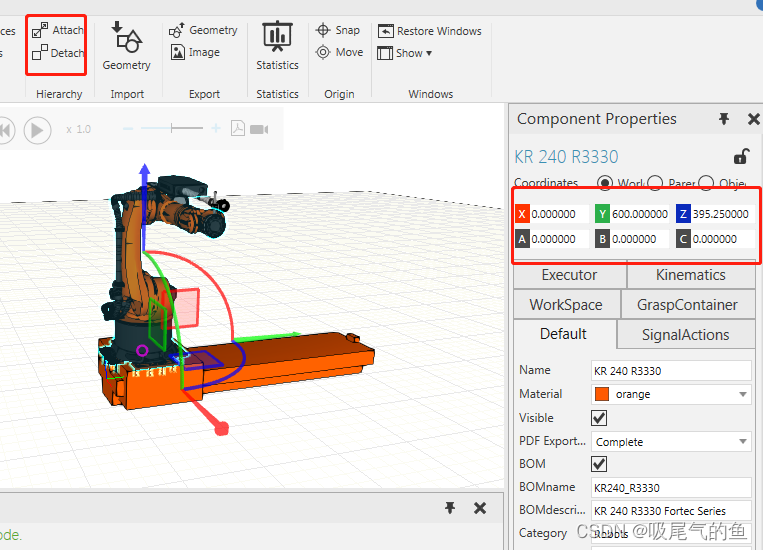
b.2、设置组件坐标系数值
选择组件后,当前组件在工作空间的位置数据见下图:
先将X、Y、Z、A、B、C全部置为零(单击数字前相应的字母即可置位);
在设置数值为:X0、Y0、Z0、A0、B0、C90;
b.3、修改坐标系的方向
Home——Origin——Move——X、Y、Z、A、B、C全部置为零——应用——完成坐标系的修改——此时坐标系与工作空间的方向一致,且位于工作空间的坐标原点;
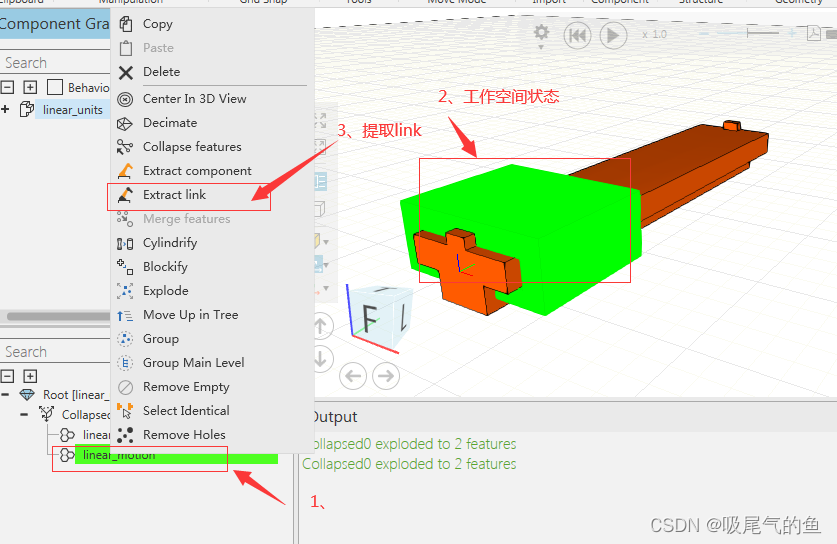
c、拆分组件
c.1、确定运动单元:选中Collapsed0__1——Features Properties——Name——linear_motion;
c.2、确定固定单元:选中Collapsed0__2——Features Properties——Name——linear_fixed;
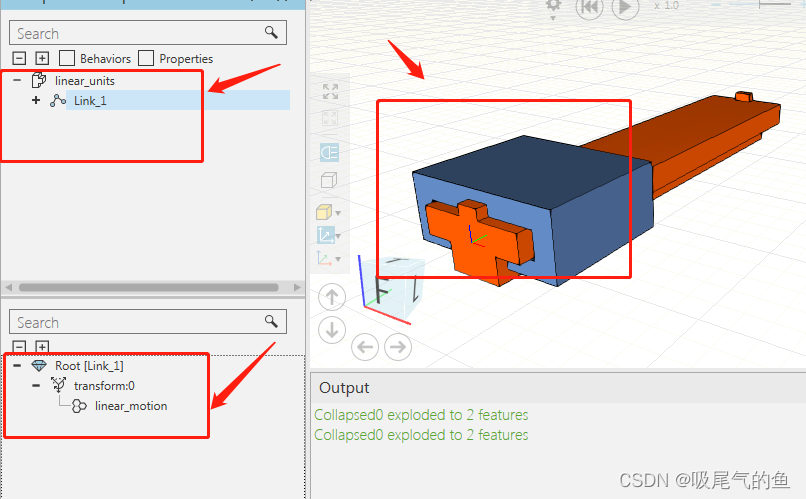
c.3、根据linear_motion创建移动的link单元:
创建完成后的状态:在linear_units下显示Link_1单元:
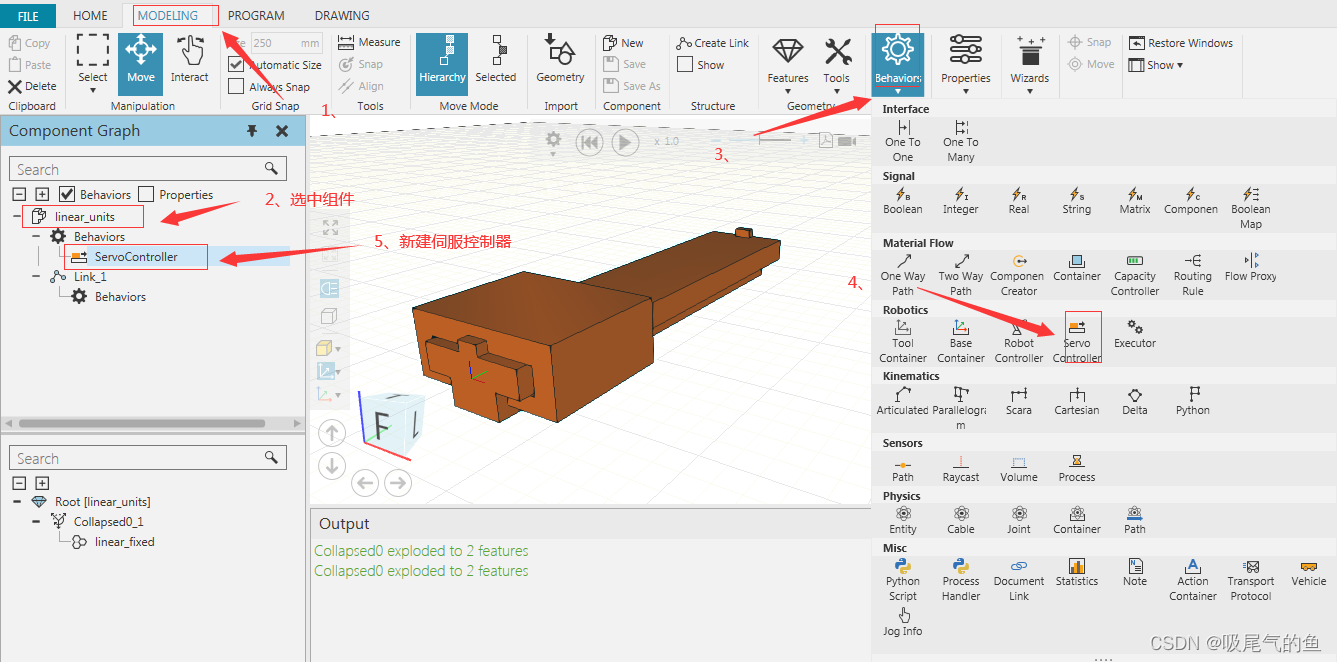
3. 添加servo伺服控制器
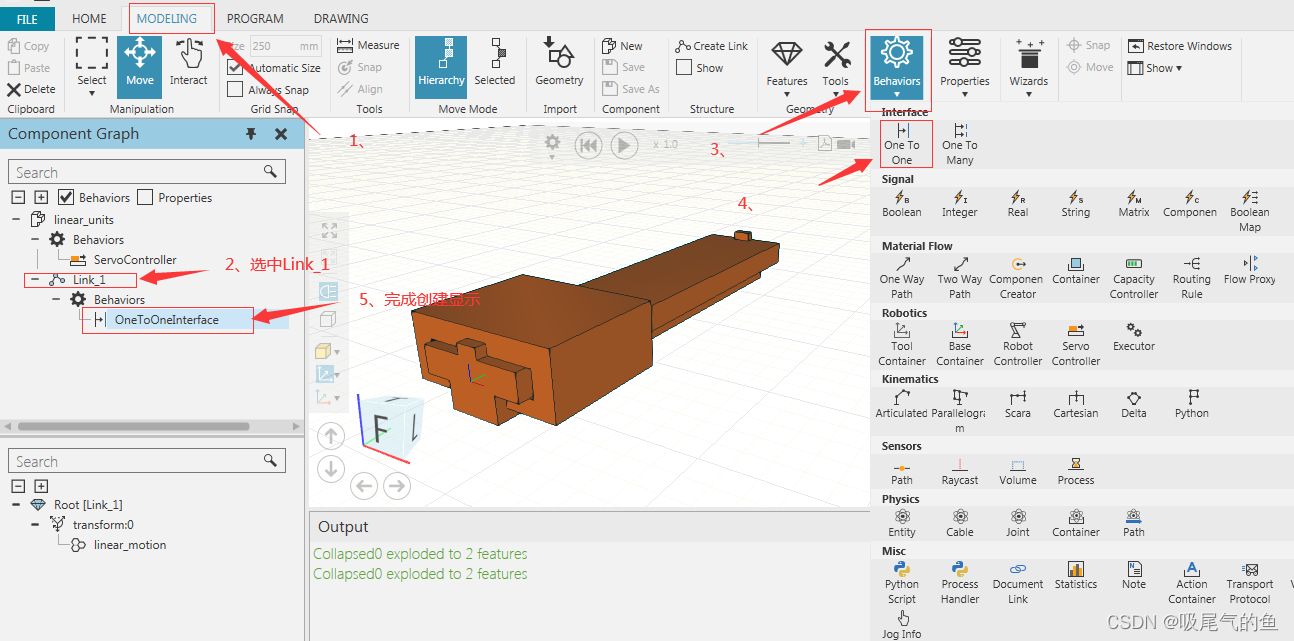
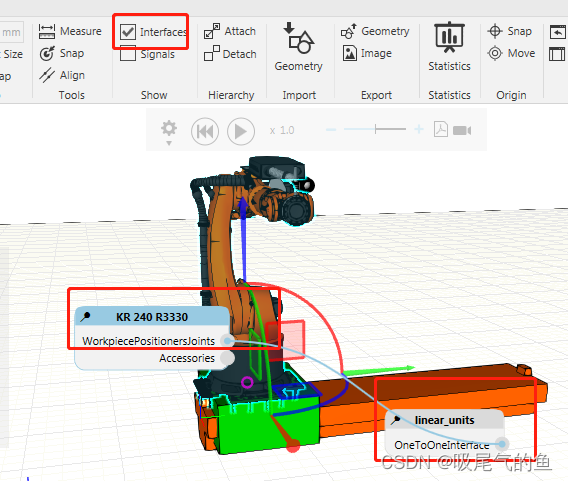
4. 创建one to one interface
MODELING——Behaviors——Interface——one to one
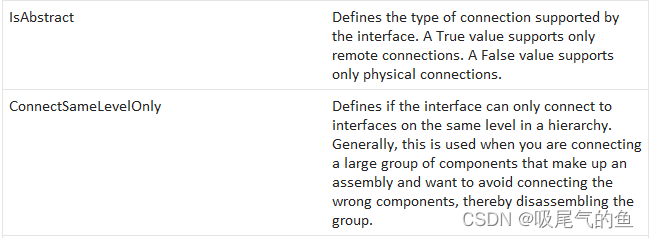
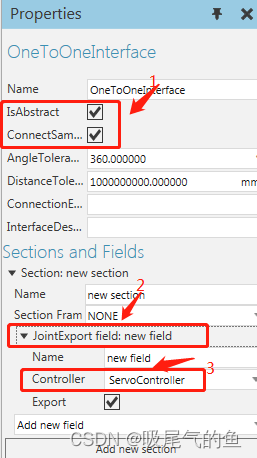
5. 修改One To oneInterface属性,创建Joint单元
a、勾选IsAbstract、ConnectSameLevelOnly(见随机Help)
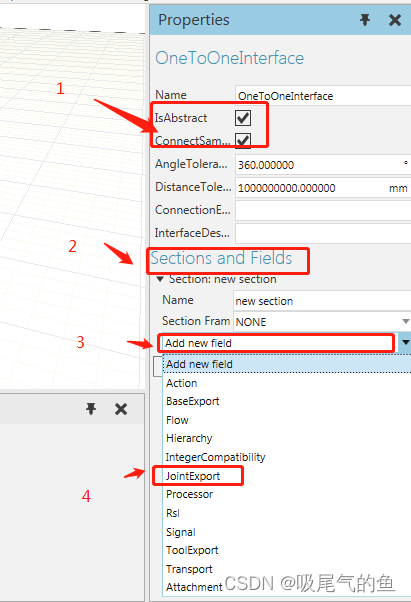
b、创建Joint export(见下图)
配置第3步的伺服电机:Sections and Fields——JointExportField——Controller——ServoController
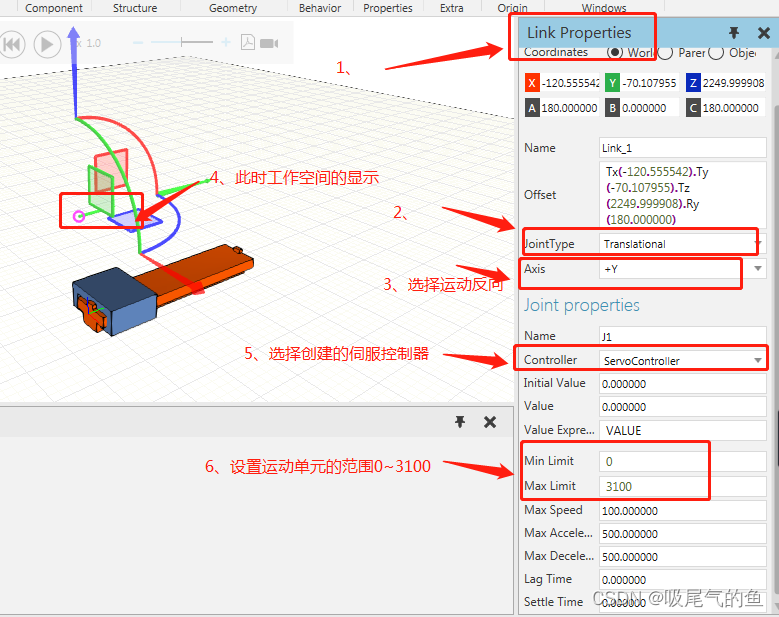
6. 修改Link_1属性
修改Link_1坐标:重复操作b.2内容——定义Link_1的坐标在移动单元中心位置
创建平移:JointType——Traslation——Y+
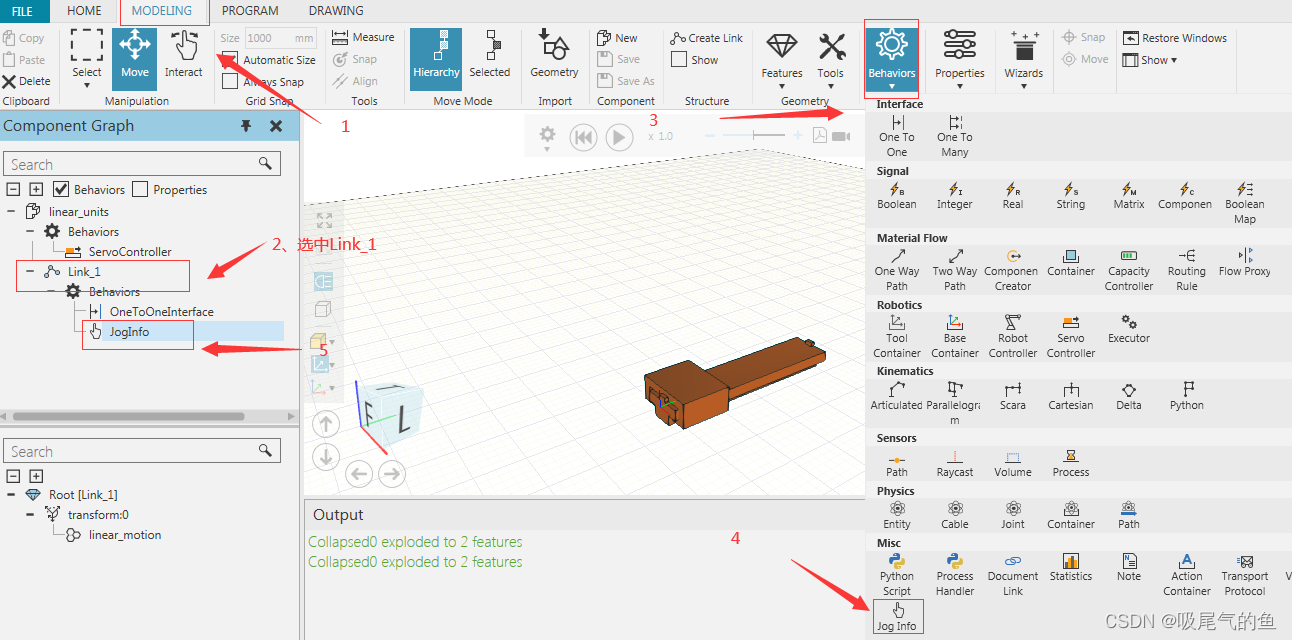
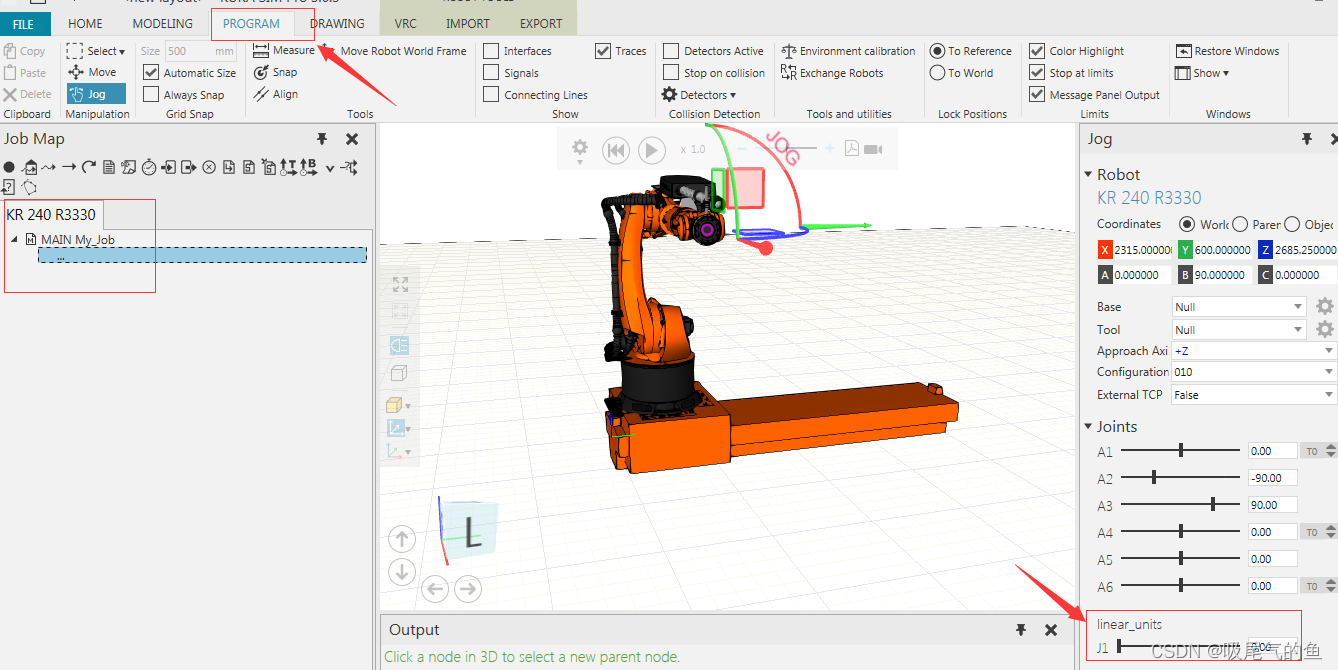
添加手动拖动操作:
Link_1——Behaviors——JogInfo——添加
修改JogInfo属性:
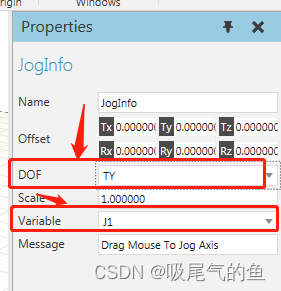
拖动运动单元,验证设置的可行性
 7. 将项目保存为Linear units_User模块,进行调用
7. 将项目保存为Linear units_User模块,进行调用
8. 新建Simpro项目
9. 导入机器人KR 240 R3330
10. 导入刚刚保存的直线导轨文件Linear units_User
11. 将机器人安装在导轨滑动块平面上:
12. 配置信号接口
13. Program
14、KRL编程完成直线导轨与机器人通信
Linear_units_User

