
随机抽样一致(RANSAC)算法及matlab实现_matlab ransac
赞
踩
随机抽样一致(RANSAC)算法及matlab实现
一、算法介绍
RANSAC为RANdom SAmple Consensus(随机抽样一致)的缩写,它是根据一组包含异常数据的样本数据集,计算出数据的数学模型参数,得到有效样本数据的算法。它于1981年由Fischler和Bolles最先提出。
RANSAC算法的应用背景是在一堆观察点中估计出某个模型 y y y。
以2D模型为例,RANSAC算法要估计 数据的最优模型 y = a x + b y=ax+b y=ax+b 。
二、算法步骤
Step1:随机抽取n个数据
从样本集合中取出n个数据。然后用这n个点去实例化模型,并将仿射变换计算出来。这个计算过程可以使用最小二乘法等等不限。需要注意的是,在选取n的时候,要随机选择最小数量的点以尽可能高的效率来检测可能的模型。例如如果模型是直线型,则 n = 2 n=2 n=2。
如果 n n n超过了最小数量,会带来如下缺点:
1.计算复杂性增加。每次迭代需要选择和处理更多的点,这可能导致算法运行速度变慢。对于直线来说,任何两点都可以确定一条直线,所以选择超过两点会增加不必要的计算。
2.更容易受到异常值的影响。如果随机选择三个点,并且其中两个是异常值,那么通过这三个点确定的直线可能会受到异常值的严重影响。而如果你只选择两个点,异常值对结果的影响可能会减少。
3.可能会导致过拟合。如果数据集中有很多异常值,使用更多的点来确定模型可能会导致模型过于复杂,从而更容易拟合到这些异常值,这被称为过拟合。
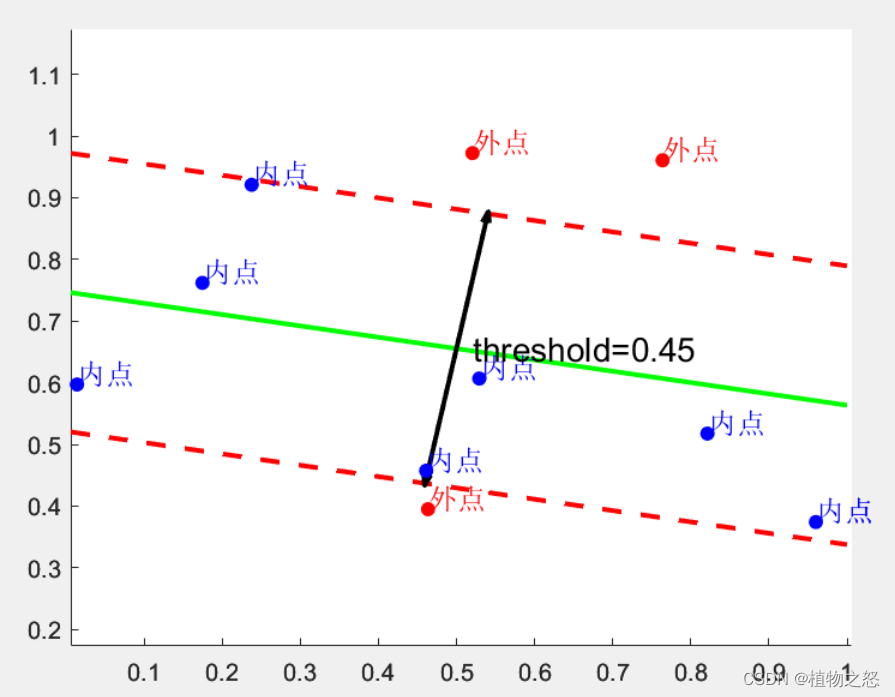
Step2:计算所有点到模型的距离di与距离门限(threshold)的距离t
定义内点*(inliers)和外点(outliers)*,其中内点可以被认为正确数据,即可以被模型描述的数据;外点可以被认为异常数据,即偏离正常范围很远、无法适应数学模型的数据。
{
∣
d
i
∣
<
t
,
i = inlier;
∣
d
i
∣
≥
t
,
i = outlier;
(1)
Step3:寻找最优模型
统计inliers的数量,记为Si,定义数量门限为T。if Si≥T,则认为此模型是合格的模型。即可以用这Si个inliers去重新估计模型*(re-estimate the model)。if Si < T,则重复Algorithm1-3,重新计算模型、求inliers和outliers*,直到得到合格的模型。
由于之前的model是由n个data所估计得到,而全部数据计算得到的inliers的数量Si一定大于n。则此时所估计出的新模型的准确度一定高于之前用n个数据所估计的旧模型。
Step4:重复N次试验(repeat for N trials)
在N次重复试验中,每次会存在一个Sij(1≤j≤N)。然后在此之中选择拥有最大的内点个数*Simax*的模型,作为最优估计模型。
这里存在两个问题:
1、如何判断两个门限t和T。t会影响内点个数,而T又会因环境不同而有不同取值。
2、如何定义重复次数N。
三、距离门限t的选择
假设数据
X
=
[
X
1
,
X
2
]
X=[X_1, X_2]
X=[X1,X2]服从方差为
σ
\sigma
σ的高斯分布。则其到模型的距离之平方服从卡方分布(chi-square distribution)。
X
1
s
i
2
+
X
2
s
i
2
=
d
s
i
2
∼
χ
2
(
2
)
(2)
X_{1si}^2+X_{2si}^2=d_{si}^2 \sim \chi^2(2) \tag{2}
X1si2+X2si2=dsi2∼χ2(2)(2)
其中,
X
1
s
X_{1s}
X1s和
X
2
s
X_{2s}
X2s分别代表对数据
X
X
X的标准化后得到的二维数据,
d
s
i
d_{si}
dsi是标准化后的距离。定义标准化门限距离
t
s
t_s
ts,计算距离平方
d
i
s
2
<
t
s
2
d_{is}^2<t_s^2
dis2<ts2的概率,此概率满足下式累积分布函数(CDF):
F
(
x
∣
k
)
=
P
(
X
≤
x
)
=
1
Γ
(
m
2
)
∫
0
x
t
m
2
−
1
e
−
t
2
d
t
(3)
F(x|k) =P(X≤x)= \frac{1}{\Gamma(\frac{m}{2})} \int_0^x t^{\frac{m}{2}-1} e^{-\frac{t}{2}}dt \tag{3}
F(x∣k)=P(X≤x)=Γ(2m)1∫0xt2m−1e−2tdt(3)
其中
Γ
\Gamma
Γ是Gamma函数,
k
k
k是卡方分布的自由度。这个CDF是卡方随机变量
X
X
X小于或等于
x
x
x值的概率。
此处下标
m
m
m为卡方分布的自由度,数据
X
X
X有几个维度,卡方分布就有几个自由度。当数据
X
X
X存在于二维平面时,
m
=
2
m=2
m=2。
{
d
i
s
2
<
t
s
2
,
i = inlier;
d
i
s
2
≥
t
s
2
,
i = outlier;
(4)
假设此时,距离小于门限值的概率,也即inliers出现的概率为
α
\alpha
α,即
P
(
d
i
2
<
t
2
)
=
α
P(d_i^2<t^2)=\alpha
P(di2<t2)=α,则:
t
s
2
=
F
k
−
1
(
α
)
(5)
t_s^2=F^{-1}_k(\alpha) \tag{5}
ts2=Fk−1(α)(5)
t 2 = F k − 1 ( α ) σ 2 (6) t^2=F^{-1}_k(\alpha)\sigma^2 \tag{6} t2=Fk−1(α)σ2(6)
四、数量门限T的选择
假设 ϵ \epsilon ϵ是在所有数据中取到一个outlier的概率,则取到一个inliers的概率为 ( 1 − ϵ ) (1-\epsilon) (1−ϵ)。
门限T控制着inliers的数量Si。当每次取出
n
t
o
t
a
l
n_{total}
ntotal个数据时,理论上inliers的数量应为
n
t
o
t
a
l
(
1
−
ϵ
)
n_{total}(1-\epsilon)
ntotal(1−ϵ)。故而可以将这个数定义为数量门限T*。即,
T
=
n
t
o
t
a
l
(
1
−
ϵ
)
(7)
T=n_{total}(1-\epsilon) \tag{7}
T=ntotal(1−ϵ)(7)
五、重复试验轮数N的选择
对于N的选择:由于在一般条件下,outlier的数量应该很少, ( 1 − ϵ ) (1-\epsilon) (1−ϵ)的值应该接近于1。为了保证N次试验中,一定有一次试验可以满足门限T,则要保证在N次实验中,至少有一次,随机抽样的n个点都是inliers。
假设一次随机抽样得到inliers的概率是 w = 1 − ϵ w=1-\epsilon w=1−ϵ。
则n次随机抽样下,至少有1点是outlier的概率为 1 − w n 1-w^n 1−wn。
则N次重复试验中,每次抽样的点都至少有1个是outlier的概率为 ( 1 − w n ) N (1-w^n)^N (1−wn)N。
则在N次重复试验中,至少有1次试验所抽取的点全都是inliers的概率为 P = 1 − ( 1 − w n ) N P=1-(1-w^n)^N P=1−(1−wn)N。
实际处理中,可以假设一个接近于1的P,则有
N
=
l
o
g
(
1
−
w
n
)
(
1
−
P
)
(8)
N=log_{(1-w^n)}(1-P) \tag{8}
N=log(1−wn)(1−P)(8)
六、外点出现概率 ϵ \epsilon ϵ的估计
上述几个参数的选择,或多或少都与outlier出现概率 ϵ \epsilon ϵ有关,但是在实际处理数据过程中,并不能预先知道数据中有多少个outlier。基于此,可以有两种方法来推动算法的继续。
1.假设 ϵ = 0.5 \epsilon=0.5 ϵ=0.5,即取到最坏的情况。若outlier出现的概率大于0.5,则该数据质量过差,使用RANSAC算法来处理也将变得毫无意义。
2.直接取
N
=
∞
N=∞
N=∞,然后设定一个计数器
i
t
e
r
a
t
i
o
n
=
0
iteration=0
iteration=0,如果
N
>
i
t
e
r
a
t
i
o
n
t
N>iterationt
N>iterationt,则进行循环。统计n个抽样点中inliers的个数,记为Si,则此时,对outlier概率的估计为:
ϵ
^
=
1
−
S
i
n
(9)
\hat{\epsilon}=1-\frac{S_i}{n} \tag{9}
ϵ^=1−nSi(9)
显然,由于此时的模型并不是最佳模型,所以求出的
ϵ
^
\hat{\epsilon}
ϵ^并不是最佳模型下outlier的概率。一般来说,此概率会大于实际outlier的概率。即
ϵ
^
>
ϵ
\hat{\epsilon}>\epsilon
ϵ^>ϵ。
再将估计的概率带入公式(7)中,可以得到
N
N
N的估计
N
^
\hat{N}
N^:
N
^
=
l
o
g
(
1
−
(
1
−
ϵ
^
)
n
)
(
1
−
P
)
(10)
\hat{N}=log_{(1-(1-\hat{\epsilon})^n)}(1-P) \tag{10}
N^=log(1−(1−ϵ^)n)(1−P)(10)
然后,再将计数器加一,重复循环。
N = inf;count=0;
if N > iteration
calculate Si;
epsilon_hat = 1-Si/n;
calculate N_hat;
N = N_hat;
increment iteration by 1;
end
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
七、代码实现与结果分析
如前所述,在2D条件下,可以有如下步骤:
1. 数据生成和初始化:
clear, clc, close all
% 生成合成数据
x = 1:200;
sigma = 10;mu = 0;
y_true = 2*x + 5;
y = 2*x + 5 + mu + sigma*randn(1,length(x)); % 加入标准差为sigma的高斯噪声
% 添加较大的误差点
num_out = 7;
sigma_out = 100;
idx = randperm(length(x), num_out);
y(idx) = y(idx) + sigma_out*rand(1);
data = [x', y'];
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
设置200个点,理论模型为 y = 2 x + 5 y=2x+5 y=2x+5,给他们添加均值为0,标准差为10的高斯噪声。这个高斯噪声视为测量数据的随机误差。
此外,再随机抽取7个点,给他们添加均值为0,标准差为100的高斯噪声。这个高斯噪声视为设置较大的测量野值,野值比随机误差的标准差要高出一个量级。
2. 门限值 t t t的设置:
假设此时,认为测量数据中,outliers只占0.5%。根据自由度为2的卡方分布的逆累积分布函数,根据给定的置信度Pt计算门限值(threshold)。
% 设置门限值
Pt = 0.995; % Pt设为0.995
% 使用chi2inv函数计算x值,自由度为2
threshold = sqrt(chi2inv(Pt, 2) * sigma);
- 1
- 2
- 3
- 4
3. 应用RANSAC算法:
调用编写好的ransacLineFit,对数据集的模型进行估计,并设置数量门限 T = 0.95 ∗ n t o t a l T=0.95*n_{total} T=0.95∗ntotal。如果预测的最佳模型中包含的内点不足数据集总数的95%,则重新进行抽样,直到满足门限。即找到最佳拟合直线,并将结果进行可视化。
%% 应用RANSAC k = 0;j=0; while 1 k=k+1; maxIter = inf; [bestLine, inlierIdx, j] = ransacLineFit(data, threshold, maxIter,j); T = length(data) * 0.965; if length(inlierIdx) >= T % 绘制结果 figure; plot(data(:,1), data(:,2), 'ro', 'LineWidth', 1.8); hold on; % 外点 plot(data(inlierIdx,1), data(inlierIdx,2), 'go', 'LineWidth', 1.8); % 内点 plot(x, bestLine(1)*x + bestLine(2), 'b-', 'LineWidth', 2); % RANSAC拟合的线 plot(x, y_true, 'm-', 'LineWidth', 2) legend({'外点', '内点', 'RANSAC拟合的线', '理论值'}, 'Location','northwest', 'FontSize', 15); title('RANSAC算法对含噪声2维模型的估计', 'FontSize', 15); grid on P = length(inlierIdx) / length(data); fprintf(' 数量循环次数: %d, 算法迭代次数: %d\n', k, j); fprintf(' 预测模型的内点比例: %.2f%%\n', P*100); break end end % 使用一次多项式进行线性拟合 p = polyfit(data(:,1), data(:,2), 1); y_fit = polyval(p, x); % p(1) 是斜率,p(2) 是y轴截距。 hold on; plot(x, y_fit, 'y-', 'LineWidth', 2); % 拟合的线 legend({'外点', '内点', 'RANSAC拟合的线', '理论值', '直接线性拟合的模型'}, 'Location','northwest', 'FontSize', 15); xlabel('x'); ylabel('y');

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
4. 准确性评估:
对经过RANSAC算法估计出的模型进行准确性评估,包含绝对准确性和相对准确性。
- 绝对准确性:考虑RANSAC拟合的直线与原始无噪声数据(
y_true)之间的差异。 - 相对准确性:首先使用所有被认为是内点的数据拟合一条直线,然后与RANSAC的结果进行比较。
%% 准确性评估 % 真实的线性模型参数 a_true = 2; b_true = 5; % 计算RANSAC得到的线参数与真实值之间的误差 error_a = abs(bestLine(1) - a_true); error_b = abs(bestLine(2) - b_true); % 输出误差 disp('——————————————准确性评估——————————————') fprintf(' 参数a误差: %f, 参数b误差: %f\n', error_a, error_b); % 1. 绝对准确性评估 % 计算RANSAC拟合线与y_true之间的差异 y_ransac = bestLine(1)*x + bestLine(2); abs_diff = y_ransac - y_true; abs_mean_error = mean(abs(abs_diff)); fprintf('平均绝对误差: %f\n', abs_mean_error); % 2. 相对准确性评估 % 使用所有内点重新拟合一条直线 inlier_data = data(inlierIdx, :); P = polyfit(inlier_data(:,1), inlier_data(:,2), 1); % 使用一次多项式拟合 y_inlier_fit = P(1)*x + P(2); rel_diff = y_ransac - y_inlier_fit; rel_mean_error = mean(abs(rel_diff)); fprintf('平均相对误差: %f\n', rel_mean_error);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
5. 鲁棒性评估:
计算RANSAC算法正确检测到的inliers的比例。并考虑使用不同比例的outliers进行测试,看看算法在何时开始失效或准确性下降。
%% 鲁棒性评估 % 通过改变离群点百分比来测试RANSAC的鲁棒性 disp('——————————————鲁棒性评估——————————————') for outlierPercentage = 0.1:0.1:0.9 % 计算给定百分比的离群点数量 numOutliers = floor(outlierPercentage * length(x)); % 在原始数据中添加随机离群点 y_with_outliers = y; idx = randperm(length(x), numOutliers); y_with_outliers(idx) = y(idx) + 50*rand(1, numOutliers); data_with_outliers = [x', y_with_outliers']; % 使用RANSAC估计线性模型参数 [bestLine, ~, ~] = ransacLineFit(data_with_outliers, threshold, maxIter, 0); % 计算估计参数与真实值之间的误差 error_a = abs(bestLine(1) - a_true); error_b = abs(bestLine(2) - b_true); % 输出离群点百分比及对应的误差 fprintf('外点比例: %f, 参数a误差: %f, 参数b误差: %f\n', outlierPercentage, error_a, error_b); end
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
6. 效率评估:
对于不同大小的数据集或不同比例的离群点,记录RANSAC的运行时间。这有助于了解算法的效率和在大数据集上的可伸缩性。
%% 效率评估
% 计时RANSAC的执行时间
tic;
[bestLine, inlierIdx, ~] = ransacLineFit(data, threshold, maxIter, 0);
time_elapsed = toc;
% 输出RANSAC的执行时间
fprintf('代码执行时间: %f s\n', time_elapsed);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
在本例中,数据量并不大,而且数据维度也不高,所以时间消耗并不大。
7. RANSAC线性拟合函数:
这是一个RANSAC的核心函数,用于从给定的数据中找到最佳的线性拟合。它随机选择数据点,用它们拟合直线,并计算数据点到该线的距离,然后基于门限值确定内点。这个函数重复进行,直到达到预定的迭代次数或者找到足够多的内点。
本例选取的重复试验轮数N由(10)式确定。
%% RANSAC线性拟合函数 function [bestLine, inlierIdx, j] = ransacLineFit(data, threshold, maxIter,j) % data: Nx2矩阵,每行是一个数据点 (x, y) % threshold: 距离阈值,用于确定内点 % maxIter: 最大迭代次数 % bestLine: 估计的线参数 [a b],对应 y = ax + b % inlierIdx: 内点在数据中的索引 numPoints = size(data, 1); bestInCount = 0; bestLine = [0 0]; inlierIdx = []; currentMaxIter = maxIter; % 当前的最大迭代次数 % 在函数开始部分初始化变量 iteration = 0; while iteration < currentMaxIter j=j+1; % 随机选择2个点 idx = randperm(numPoints, 2); sample = data(idx, :); % 使用这2个点拟合一条线 a = (sample(2,2) - sample(1,2)) / (sample(2,1) - sample(1,1)); b = sample(1,2) - a*sample(1,1); % 计算所有点到这条线的距离 distances = abs(a*data(:,1) - data(:,2) + b) / sqrt(a^2 + 1); % 找到内点 inliers = distances < threshold; % 如果当前模型比之前的好,则更新最佳模型 numInliers = sum(inliers); if numInliers > bestInCount bestInCount = numInliers; bestLine = [a b]; inlierIdx = find(inliers); % 根据内点比例动态更新currentMaxIter w = bestInCount / numPoints; p = 0.997; maxIterNew = ceil(log(1-p) / log(1-w^2)); if w > 0.999 % 设置一个迭代的上限,例如1e3 currentMaxIter = min([maxIter, maxIterNew, 1e3]); else currentMaxIter = min(maxIter, maxIterNew); end end % 更新迭代次数 iteration = iteration + 1; end end
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
8.结果分析
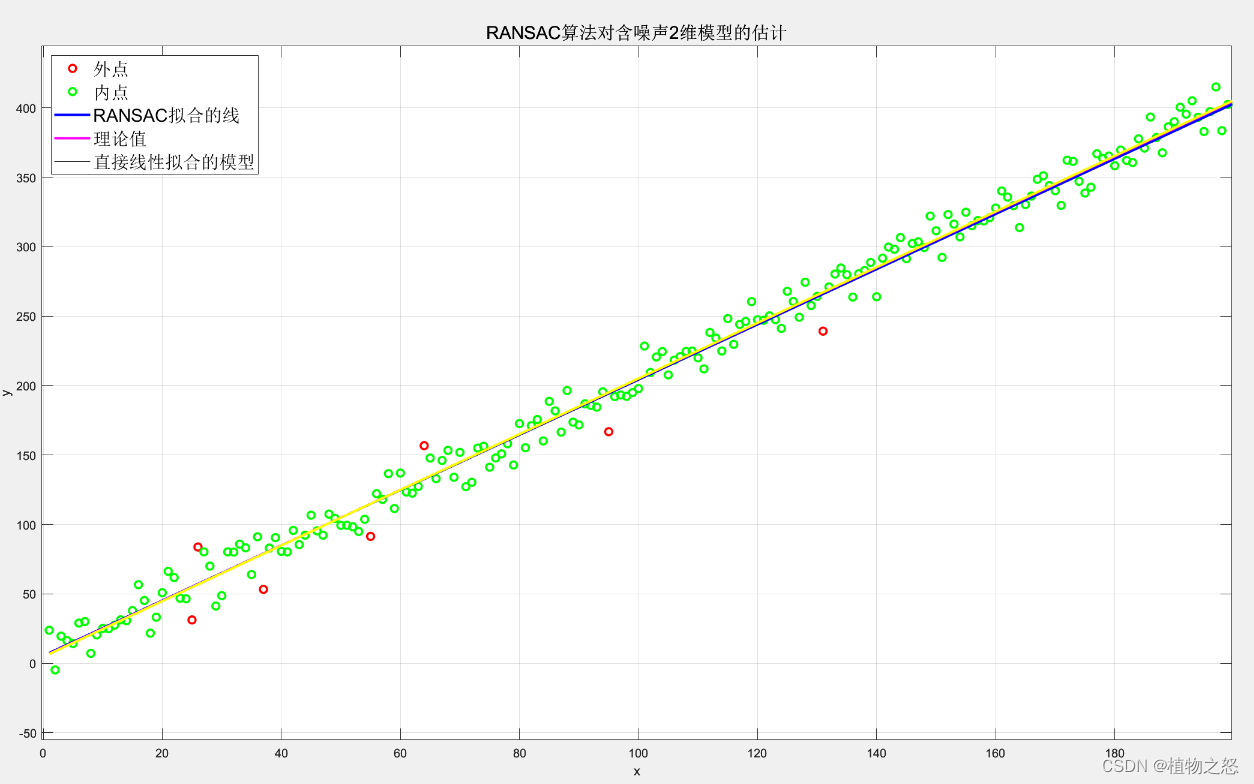
如上图,外点为红色,内点为绿色。粉线表示理论模型 y = 2 x + 5 y=2x+5 y=2x+5,蓝线表示在增加了随机噪声和测量野值后,经过RANSAC算法预测后的模型,黄线表示直接进行线性拟合的模型。
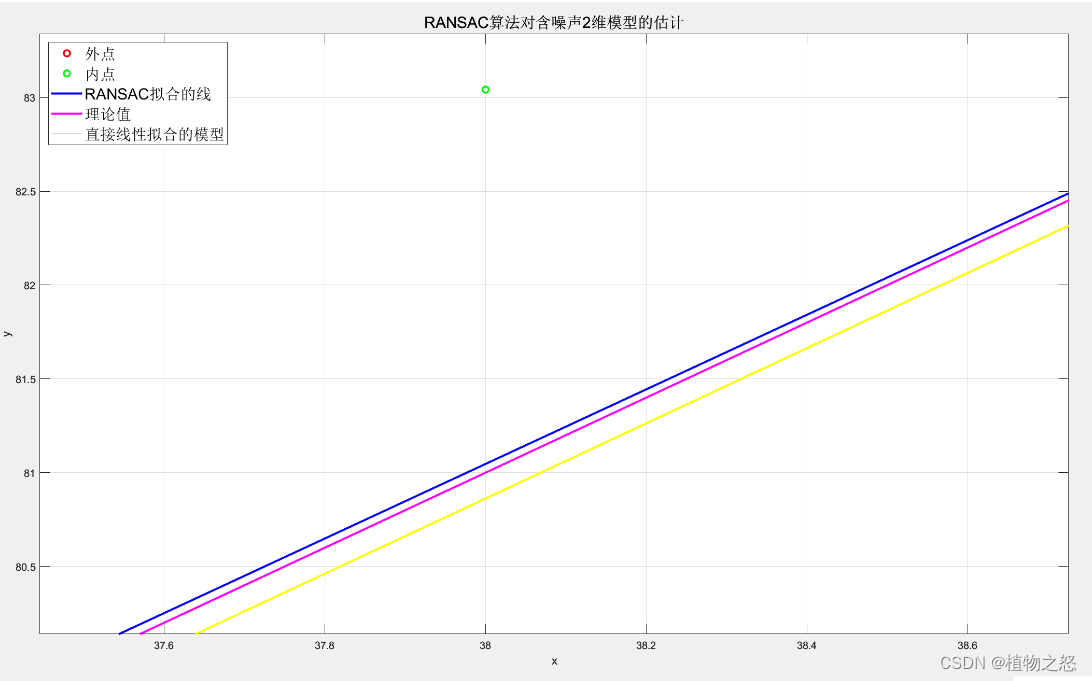
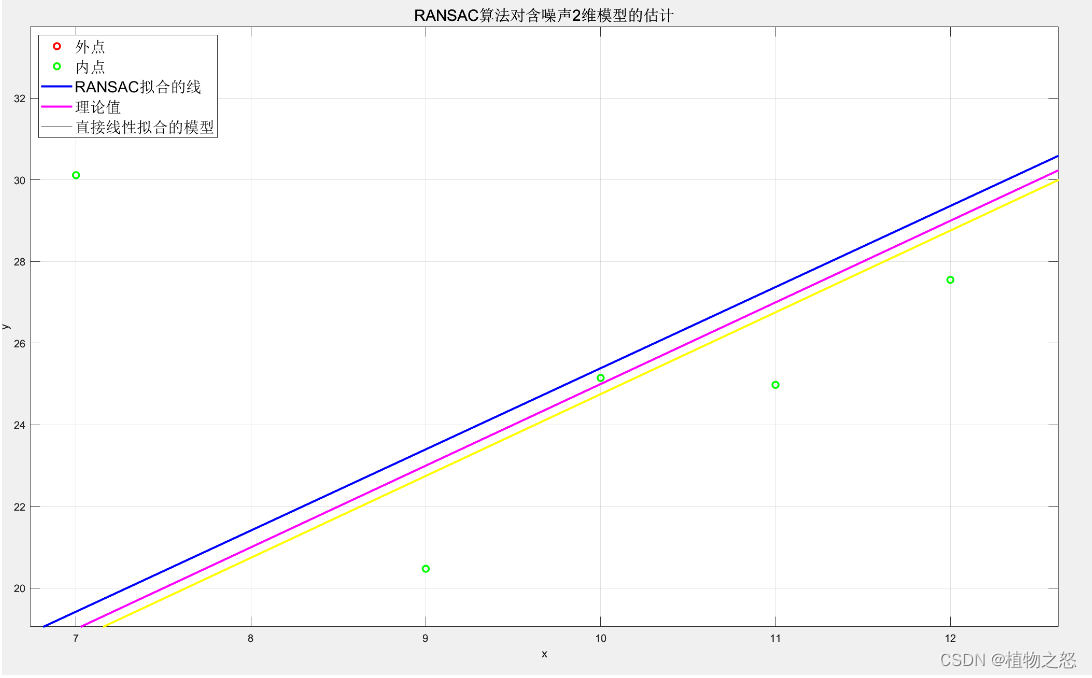
可以看到在局部区域二者性能相仿,在噪点较多的地方,RANSAC算法处理的模型要稍微优于直接拟合。
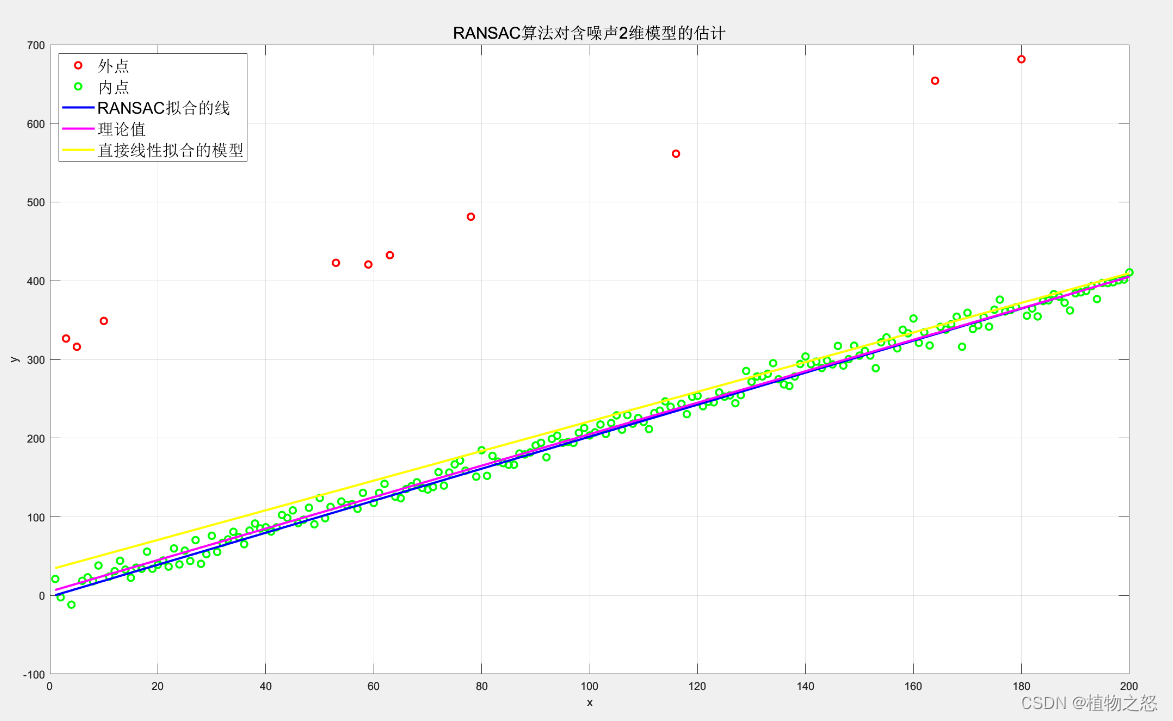
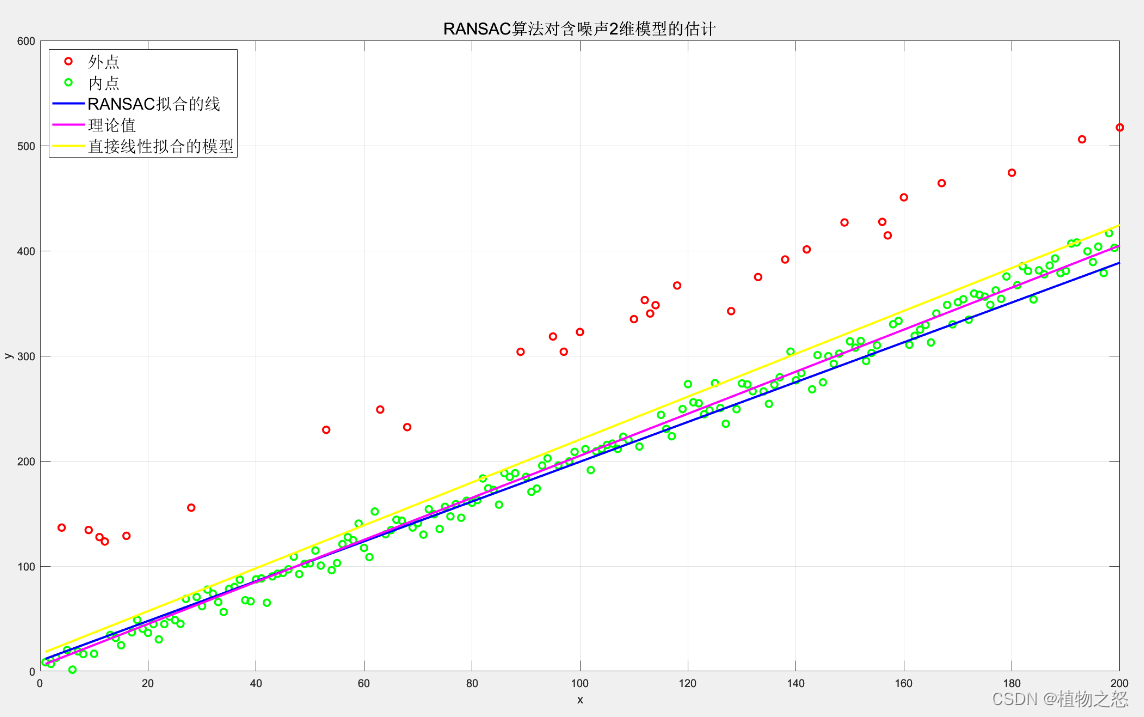
如上图所示,当野值偏差较大或数量较多时,RANSAC的性能显著优于直接线性拟合。
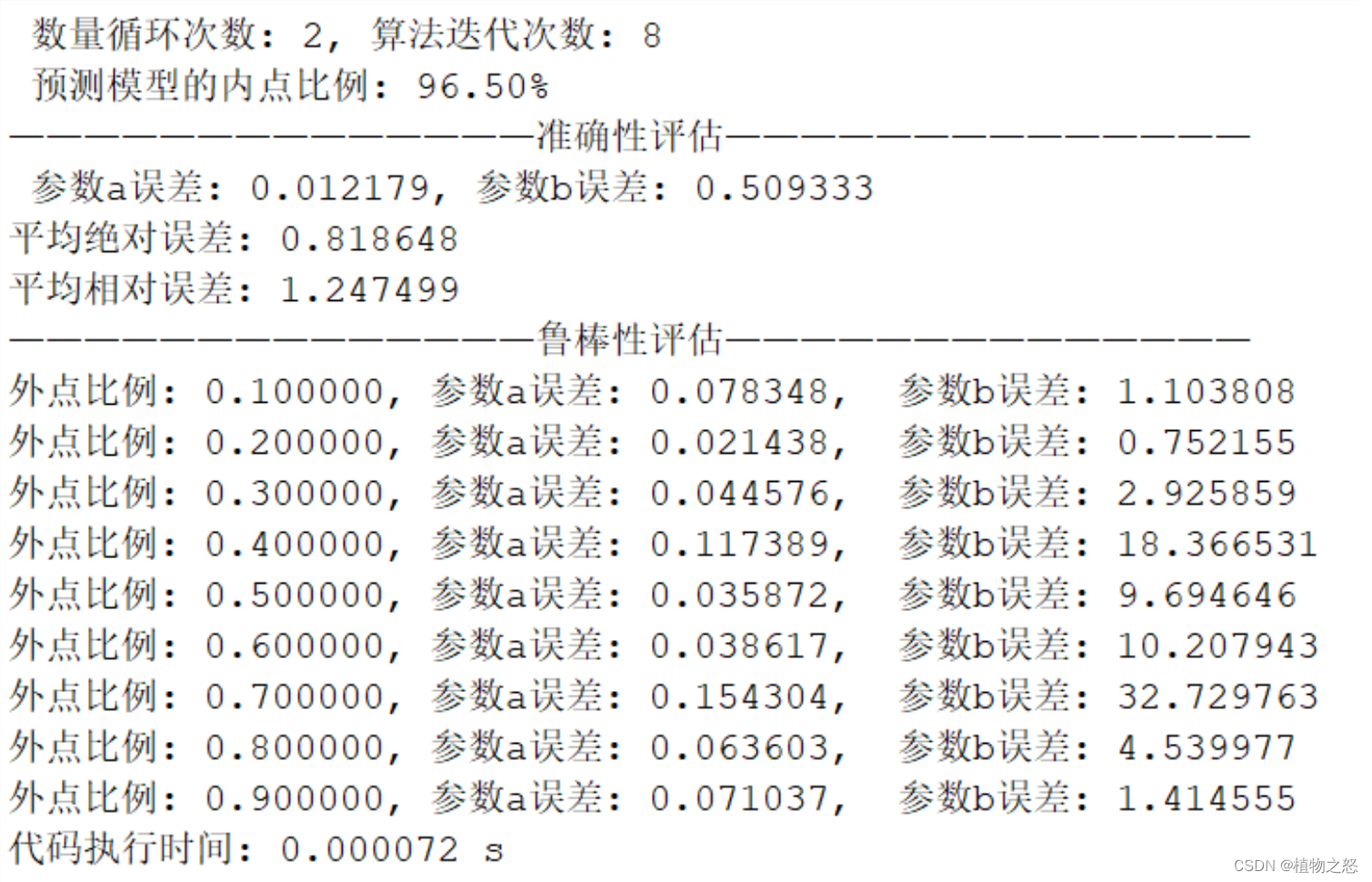
在本次的处理中,准确性较好。迭代次数也并不大,避免了大量的时间消耗。
对算法鲁棒性的分析中,可以看到从外点比例达到40%开始,算法的准确度就开始明显下降。同时,当外点比例达到80%以上时,由于本例采用高斯分布来仿真测量中的随机误差和测量野值,这使得当外点比例过大时,算法会将外点当作内点。由于外点和内点都符合高斯分布,所以也可以得到较好的“准确性”。但是在现实处理中,测量野值并不会服从什么分布,这就会使的当外点数量过大的时候,算法性能又进一步下降。

