
热门标签
热门文章
- 1STM32使用HAL库、标准库、LL库和寄存器操作的性能对比_stm32 一般用标准库还是寄存器
- 2GlobalMapper20根据CAD图中的等高线生成GIS用的地形数据_cad等高线导入gis做地形图
- 3Ubuntu 系统如何修改时间_ubuntu设置时间
- 4异步场景加载详解_unity异步加载场景
- 5win10中最常用快捷键大全_ctrl + r 和 ctrl + f5
- 6C++初阶:入门泛型编程(函数模板和类模板)
- 7Python学习笔记(七):元组的使用方法
- 8[Unity]编辑器在没有运行场景的时候就运行脚本_unity executeineditmode自动运行
- 9vue+element+admin实现前后端连接_vue前端和后端怎么连接起来
- 10首次添加iconfont和在已有iconfont文件中新增不同iconfont项目图标_iconfont添加新图标
当前位置: article > 正文
unity中Transform.LocalToWorldMatrix的计算与验证
作者:Gausst松鼠会 | 2024-02-19 19:17:46
赞
踩
localtoworldmatrix
最近对Transform.LocalToWorldMatrix的矩阵很好奇,想知道它具体是怎么得到的,于是做了验证。
- 旋转顺规
首先,unity的旋转顺规世界系下是zxy,自身系是yxz,可以这样理解:
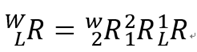
世界系下zxy顺规:表示的是别的系转到世界系下的顺规,而且是以z-x-y旋转先后顺序旋转。如,局部系L先绕z轴转到1系下,1系绕x轴转到2系下,2系绕y轴转到世界系W下。公式表示(这个公式对应LocalToWorldMatrix,R表示旋转矩阵):
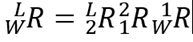
自身系下yxz顺规:表示别的系转局部系的顺规,是以y-x-z先后顺序旋转。如,世界系W先绕y轴转到1系下,1系绕x轴转到2系下,2系绕z轴转到局部系L下。公式表示(这个公式对应WorldToLocalMatrix):
- 旋转欧拉角
对于Inspector面板上的transform组件,在Rotation中的xyz旋转角都是在世界系下的旋转角。不用改符号直接用于局部系转世界系中。
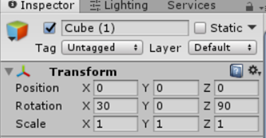
对于下图局部系z轴,由世界系转成局部系:角度由0转到90,角度增加,z坐标轴旋转方向:从头看是顺时针旋转,所以定义从头看顺
推荐阅读
相关标签

