
- 1NLP(六十三)使用Baichuan-7b模型微调人物关系分类任务_firefly-baichuan-7b
- 2Tomcat源码解析系列一:Tomcat的整体架构_tomcat源码全解
- 3真正解决方案:java.lang.ClassNotFoundException: javax.xml.bind.JAXBException
- 4正式签约 | 杭州悦数联袂电子科大重点实验室,打造基于图技术的智慧电网解决方案
- 5mysql底层事务_Mysql事务特性的底层实现浅谈
- 6背刺!字节不讲武德!没发offer就背调,今天主管找我,说他不会配合背调!
- 7ESP32-Cam--获取图像定时写入SD卡_config xclk_freq
- 8使用LoadRunner进行并发测试、压力测试和负载测试_loadrunner压力测试500并发
- 9[转载] 在IIS上启用https的免费ssl证书使用教程
- 10WebSQL 的简单使用
多模态论文阅读-LLaVA
赞
踩
Abstract
使用机器生成的instruction-following data 对大型语言模型(LLMs)进行指令调优已被证明可以提高新任务的zero-shot能力,但该想法在多模态领域的探索较少。我们首次尝试使用languguage-only GPT-4来生成multimodal language-image instruction-following data。通过对这些生成的数据进行指令调优,我们引入了LLaVA:大型语言和视觉助理(Large Language and Vision Assistant),这是一个端到端训练的大型多模态模型,它将视觉编码器和LLM连接起来,用于通用的视觉和语言理解。为了促进视觉指令跟随的进一步研究,我们构建了****两个具有多样化和挑战性的应用导向任务的evaluation benchmarks。我们的实验表明,LLaVA展示了令人印象深刻的多模态聊天能力,有时在看不见的图像/指令上表现出multimodal GPT-4的行为,与GPT-4在合成(synthetic)的多模态指令遵循数据集上相比,产生了85.1%的相对分数。当在Science QA上进行微调时,LLaVA和GPT-4的协同(synergy)作用达到了92.53%的最新先进水平。我们让GPT-4生成的visual instruction tuning data、我们的模型和代码公开可用。
1. Introduction
人类通过视觉和语言等多种渠道与世界互动,每一种渠道在表达和交流某些概念方面都具有独特的优势,因此有助于更好地理解世界。人工智能的核心目标之一是开发一种通用(general-purpose)的助手,它可以有效地遵循多模态视觉和语言指令,与人类的意图保持一致,在野外完成各种现实世界的任务。
为此(to end this),社区对开发语言增强基础视觉(language-augmented foundation vision models)产生了浓厚的兴趣,这些模型具有强大的开放世界视觉理解能力,如分类、检测、分割和字幕,以及视觉生成和编辑。在这一系列工作中,每个任务由一个单一的大视觉模型独立解决,在模型设计中隐式地(implicityly)考虑任务指令。此外,语言仅用于描述图像内容。虽然这允许语言在将视觉信号映射到语言语义(人类交流的常见渠道)方面发挥重要作用,但它导致模型通常具有固定接口,交互性和对用户指令的适应性有限。
另一方面,大型语言模型(LLM)已经表明,语言可以发挥更广泛的作用:作为通用助手的通用接口,各种任务指令可以显式地用语言表示,并引导端到端训练的神经助手切换到感兴趣的任务来解决它。例如,最近ChatGPT和GPT-4的成功证明了对齐LLM在遵循人类指令方面的强大功能,并激发了开发开源LLM的巨大兴趣。其中,LLaMA是一个与GPT-3性能相匹配的开源LLM。Alpaca , Vicuna , GPT-4-LLM利用各种机器生成的高质量指令遵循示例来提高LLM的对齐能力,与所有的(proprietary)LLM相比,展现了令人印象深刻的性能。重要的是,这一些工作是纯文本的**(text-only**)。
在本文中,我们提出了visual instruction-tuning,这是将visual instruction-tuning扩展到语言-图像多模态空间的第一次尝试,为构建通用的视觉助手铺平了道路(pave the way)。特别地,我们的论文做出了以下贡献:
- Multimodal instruction-following data. 一个关键的挑战是缺乏visual-language instruction-following data 。我们使用ChatGPT/GPT-4提出了一个数据转换视角(reformation perspective)和管道,将图像-文本对转换为适当的instruction-following格式.
- Large multimodal models:我们通过将open-set的视觉编码器CLIP与语言解码器Vicuna连接起来,开发了一个大型多模态模型(LMM),并对我们生成的instruction vision-language decoder进行端到端的微调。我们的实证(empirical)研究验证了使用生成数据进行LMM指令调优的有效性,并提出了构建通用instruction-following visual agent的实用技巧。当与GPT-4集成时,我们的方法在Science QA多模态推理数据集上实现了SoTA。
- Multimodal instruction-following benchmark:我们现在的LLaVA-Bench有两个具有挑战性的基准,有多种选择的配对图像,instruction和详细的注释。
- open-source: the generated multimodal instruction data, the codebase,the model checkpoints以及一个visual chat demo.
2. Related Work
- Multimodal Instruction-following Agents.在计算机视觉中,现有的构建指令跟随agent的工作可以大致分为两类:(i)端到端训练模型,它们分别针对每个特定的研究主题进行探索。例如,视觉语言导航任务(vision-languague navigation task)和Habitat要求嵌入的AI智能体遵循自然语言指令,并采取一系列动作来完成视觉环境中的目标。在图像编辑领域(image editing domain),给定输入图像和告诉agent该做什么的书面指令,InstructPix2Pix通过遵循人类指令来编辑图像。(ii)通过LangChain / LLMs协调各种模型的系统,如Visual ChatGPT、X-GPT、MM-REACT、VisProg和ViperGPT。虽然在构建Instruction-following Agents方面有相同的目标,但我们专注于为mltiple tasksl开发端到端的训练语言视觉多模态模型。
- **Instruction Tuning.**在自然语言处理(NLP)领域,为了使GPT-3、T5、PaLM和OPT等LLM能够遵循自然语言指令并完成现实世界的任务,研究人员探索了LLM指令调优的方法,从而分别产生了指令调优的对应物countpart,如InstructGPT /ChatGPT、FLAN-T5、FLAN-PaLM和OPT- iml。结果表明,这种简单的方法可以有效地提高llm的zero-shot和few-shot的泛化能力。因此,将NLP的思想借用到计算机视觉是很自然的。更广泛地说,基于基础模型的teacher-student distillation已经在图像分类等其他主题中得到了研究。Flamingo可以被看作是多模态域的GPT-3,因为它在zero-shot任务迁移和in-context-leaning方面表现出色。其他在图像文本对上训练的lmm包括BLIP-2、FROMAGe和KOSMOS-1。PaLM-E是一个用于嵌入AI的LMM。基于最近“最好的”开源LLM LLaMA, OpenFlamingo和lama - adapter使LLaMA能够使用图像输入,为构建开源多模态llm铺平了道路。虽然这些模型表现出很好的任务转移泛化性能,但它们没有明确地与视觉语言指令数据进行tuning,并且它们在多模态任务中的性能通常低于(fall short)仅语言任务。本文旨在填补这一空白,并研究其有效性。最后,需要注意的是,视觉指令调优与视觉prompt调优不同:前者旨在提高模型的指令跟随能力,后者旨在提高模型自适应的参数效率。
3. GPT-assisted Visual Instruction Data Generation
社区见证了公共multimodal数据(如图像-文本对)数量的激增,从CC到LAION。然而,当提到multimodal instruction-following data,可用的数量有限,部分原因是,当考虑到人类crowd-scouring筛选时,创建此类数据的过程既耗时又不well-defined。受到最近GPT模型在文本注释任务中的成功的启发,我们提出基于广泛存在的image-pair数据利用ChatGPT/GPT-4进行多模态instruction-following data collection。
对于图像Xv及其相关的captionXc,创建一组指示助手描述图像内容的问题Xq是很正常的。我们prompt GPT-4整理(curate)这样一个问题列表。因此,将图像-文本对扩展到其instruction-following版本的一个简单方法是Human: Xq Xv < STOP> Assistant: Xc< STOP>。虽然构建成本低廉,但这种简单的扩展版本在指令和响应方面缺乏多样性和深度推理。为了缓解这个问题,我们利用仅语言的GPT-4或ChatGPT作为强大的教师(两者都只接受文本作为输入),以创建包含视觉内容的instruction-following data。**具体来说,为了将图像编码为视觉特征以提示纯文本GPT,我们使用两种类型的象征(symbolic)表示:(i)Captions:典型地从不同的角度描述视觉场景。(ii)Bounding boxes:通常对场景中的物体进行定位,每个方框对object概念及其空间位置进行编码。**如下图所示:

这种象征表示允许我们将图像编码为LLM可识别的序列。我们使用COCO图像,生成三种类型的指令跟随数据。如下图所示。对于每种类型,我们首先手动设计一些示例。它们是我们在数据收集过程中唯一的人工注释,并被用作在上下文学习中query GPT-4的种子示例。

我们总共收集了158K个unique的语言图像指令遵循样本,其中对话58K,详细描述23K,复杂推理77k。我们在早期实验中消融了ChatGPT和GPT-4的使用,发现GPT-4持续地提供更高质量的指令跟随数据,例如空间推理。
4. Visual Instruction Tuning
4.1 Architecture
主要目标是有效地利用预训练的LLM和visual模型的能力。网络架构如下图。我们选择Vicuna作为我们的LLM fϕ(·)由ϕ参数化,因为它在公开可用的language tasks checkpoints中具有最佳的instruction following 能力。

对于输入图像Xv,我们利用预训练的CLIP视觉编码器ViT-L/14,它提供视觉特征Zv = g(Xv)。我们的实验利用 了最后一层Transformer前后的网格特征。我们利用一个简单的线性层将图像特征转换到词嵌入空间。具体来说,我们使用一个可训练的投影矩阵W将Zv转换为语言嵌入令牌Hv,它与语言模型中的词嵌入空间具有相同的维数:

这样,我们就有了一系列视觉标记Hv。请注意,我们的简单投影方案是轻量级的,它允许我们快速迭代以数据为中心的实验。还可以考虑更复杂的方案来连接图像和语言表征,例如Flamingo中的门控交叉注意[2]和BLIP-2中的Q-former[28]。我们将为LLaVA探索更有效、更复杂的架构设计作为未来的工作。
4.2 Training
对于每张图像Xv,我们生成多回合对话数据(X1 q, X1 a,···,XT q, XT a),其中T为总对话数。我们将它们组织成一个序列,将所有的回答视为助手的响应,并将指令Xt指令在第t轮处为:

这引出了多模态指令跟随序列的统一格式表2:

表2 用于训练模型的输入序列。这里只说明了两个对话回合;在实践中,回合数根据指令遵循数据而变化。在我们当前的实现中,我们遵循Vicuna-v0来设置系统消息Xsystem-message,我们设置< stop > = ###。该模型被训练来预测assistabt答案和停止的位置,因此只有绿色序列/令牌用于计算自回归模型中的损失。
我们使用其原始的自回归训练目标对预测令牌执行LLM的指令调优。具体来说,对于长度为L的序列,我们计算目标答案Xa的概率:

其中,θ为可训练参数,xdirective,<i和Xa,<i分别为当前预测令牌xi之前所有回合的指令令牌和回答令牌。对于上述公式中的条件,我们显式地添加了Xv,以强调图像是基于所有答案的事实,并且为了更好的可读性,我们省略了Xsystem-message和所有前面的
- **Pre-training for feature alignment.为了在概念覆盖率和训练效率之间取得平衡,我们将CC3M过滤到595K图像-文本对。使用第3节中描述的朴素扩展方法将这些数据对转换为跟随指令的数据。每个样本都可以视为单回合对话。为了构造(2)中的输入x指令,对于图像Xv,随机采样一个问题Xq,这是一个语言指令,要求助手对图像进行简要描述。预测答案的ground-truth 是Xa原始的caption。在训练中,我们保持视觉编码器和LLM权值不变,**并最大化(3)的似然值,只有可训练参数θ = W(投影矩阵)。这样,图像特征Hv可以与预训练的LLM词嵌入对齐。这个阶段可以理解为为冻结的LLM训练一个兼容的视觉tokenizer。
- **Fine-tuning End-to-End.**我们始终保持视觉编码器权值不变,并不断更新投影层和LLM的预训练权值;即,可训练的参数是θ = {W, ϕ} in(3)。我们考虑两个特定的用例场景:
- **Multimodal Chatbot:**我们通过对第3节中的158K语言图像指令跟踪数据进行微调来开发聊天机器人。在这三种类型的响应中,会话是多回合的,而其他两种是单回合的。它们在训练中被统一采样。
- Science QA:我们在ScienceQA基准上研究了我们的方法,这是第一个大规模的多模态科学问题数据集,它用详细的lecture和解释注释了答案。每个问题都以自然语言或图像的形式提供上下文。Assistant 用自然语言提供推理过程,并从多个选项中选择答案。对于(2)中的训练,我们将数据组织为单回合对话,问题和上下文作为Xinstruct,推理和答案作为Xa
5 Experiments
我们通过两个主要的实验设置分别评估了LLaVA在指令跟随和视觉推理能力方面的性能:多模态聊天机器人和ScienceQA数据集。我们使用8× A100训练所有模型,遵循Vicuna的超参数。我们在过滤后的CC-595K子集上对模型进行了1 epoch的预训练,学习率为2e-3,批大小为128,并对提出的llava - instruction - 158k数据集进行了3 epoch的微调,学习率为2e-5,批大小为32
5.1 Multimodal Chatchot
我们开发了一个聊天机器人演示,以展示LLaVA的图像理解和对话能力,并研究LLaVA在消化视觉输入和展示指令遵循方面的能力。我们首先使用原始GPT-4论文中的示例,如表3所示,这些示例需要深入的图像理解。为了比较,我们从他们的论文中引用了多模态GPT-4的prompt和response,并query了BLIP-2和OpenFlamingo模型检查点来获得它们的回答。
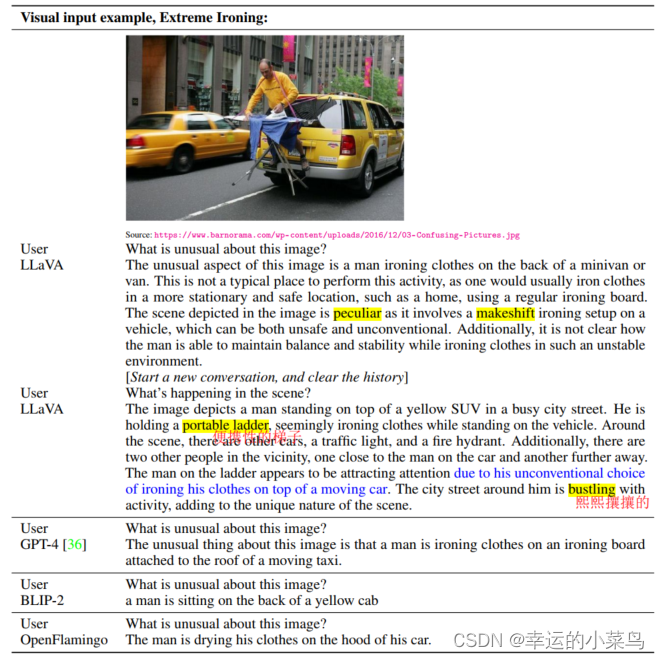
表3:LLaVA准确地遵循用户的指示,而不是简单地描述场景。LLaVA提供比GPT-4更全面的响应。即使只是被要求描述图像,LLaVA也能识别出图像的非典型(atypical)方面
令人惊讶的是,尽管LLaVA是用一个小的多模态指令跟随数据集(~ 80K唯一图像)训练的,但它在这些示例上展示了与多模态GPT-4非常相似的推理结果。请注意,虽然这些图像是LLaVA的out-of-domain图像,但LLaVA仍然能够理解场景并按照问题说明提供合理的响应。相比之下,BLIP-2和OpenFlamingo侧重于描述图像,而不是按照用户的指示以适当的方式回答.
- Quantitaive Evaluation: 为了系统地了解LLaVA的性能,我们提出了一个定量metric来衡量模型在多模态数据上的instruction-following capability。受Vicuna的启发,我们利用GPT-4来衡量生成的响应的质量。具体来说,我们创建了由图像、基本事实文本描述和问题组成的三元组。候选模型(例如,LLaVA)根据问题和图像预测答案。为了提供一个近似的理论上限,我们基于问题和真实文本描述创建了一个参考预测。在获得两个模型的响应后,我们将问题、视觉信息(以文本描述的格式)和两个助手生成的响应馈送给裁判(judge)(即纯文本GPT-4)。它评估助手回答的有用性、相关性、准确性和详细程度,并给出1到10分的总分,分数越高表明整体表现越好,为了我们更好的理解模型,judge也被要求提供一个全面的评价解释。我们报告了关于(w.r.t.)纯文本GPT-4模型使用textural ground truth描述作为视觉输入的相对分数。我们创建了两个基准来评估模型的性能:
- LLaVA-Bench (COCO): 我们从COCO-Val-2014中随机选择30张图像,对于每张图像,我们使用第3节中提出的数据生成管道生成三种类型的问题(对话、详细描述、复杂推理),总共90个问题。该基准测试研究模型的对齐行为和具有一致视觉输入的功能。我们改变训练数据集来研究不同类型指令跟随数据的有效性,结果如表4所示。首先,通过指令调优,模型遵循用户指令的能力显著提高了50分以上。其次,增加少量的详细描述和复杂的推理问题,使模型的整体能力提高了7分。此外,它还提高了模型在会话问题上的表现,这表明推理能力的提高是对会话能力的补充。最后,我们表明,拥有所有三种类型的数据产生了85.1%的最佳性能。

- LLaVA-Bench (In-the-Wild): 为了评估模型在更具挑战性的任务中的能力和对新领域的可泛化性,我们收集了24张不同的图像,总共有60个问题,包括室内和室外场景、模因、绘画、草图等,并将每张图像与高度详细的手动策划描述和适当的问题选择相关联。我们在表5中比较了LLaVA、BLIP和OpenFlamingo。由于视觉指令调整,LLaVA的性能明显优于BLIP-2(+29%)和OpenFlamingo(+48%)。与具有基础真值标签的纯文本GPT-4相比,LLaVA在复杂推理问题上的表现达到了令人印 象深刻的81.7%,总分为67.3%。

- LLaVA-Bench (COCO): 我们从COCO-Val-2014中随机选择30张图像,对于每张图像,我们使用第3节中提出的数据生成管道生成三种类型的问题(对话、详细描述、复杂推理),总共90个问题。该基准测试研究模型的对齐行为和具有一致视觉输入的功能。我们改变训练数据集来研究不同类型指令跟随数据的有效性,结果如表4所示。首先,通过指令调优,模型遵循用户指令的能力显著提高了50分以上。其次,增加少量的详细描述和复杂的推理问题,使模型的整体能力提高了7分。此外,它还提高了模型在会话问题上的表现,这表明推理能力的提高是对会话能力的补充。最后,我们表明,拥有所有三种类型的数据产生了85.1%的最佳性能。
**Limitations.**这个LLaVA-Bench(野外)的设计是具有挑战性的,并揭示了模型的弱点。我们在表6中提供了两个带有相关标题和问题的示例。对于拉面的例子(左),要正确回答餐厅的名称,需要模型具有很大的知识覆盖率和多种语言理解能力;为了正确地描述配菜(side dishes),模型可能需要从Internet检索相关的多模态信息。对于冰箱的例子(右),感知酸奶的正确品牌需要模型处理高分辨率图像并拥有广泛的知识覆盖。我们还观察到LLaVA的一个有趣的失败,当被问及是否有草莓味的酸奶时,它会回答“是”,尽管冰箱里只有酸奶和草莓。这表明,有时,LLaVA将图像视为“补丁包”(bag of patches),无法掌握图像中的复杂语义。我们希望LLaVA可以作为基准的坚实基线,在此基础上,我们的发现可以启发未来开发更有能力的LMMs的工作。

5.2 ScienceQA
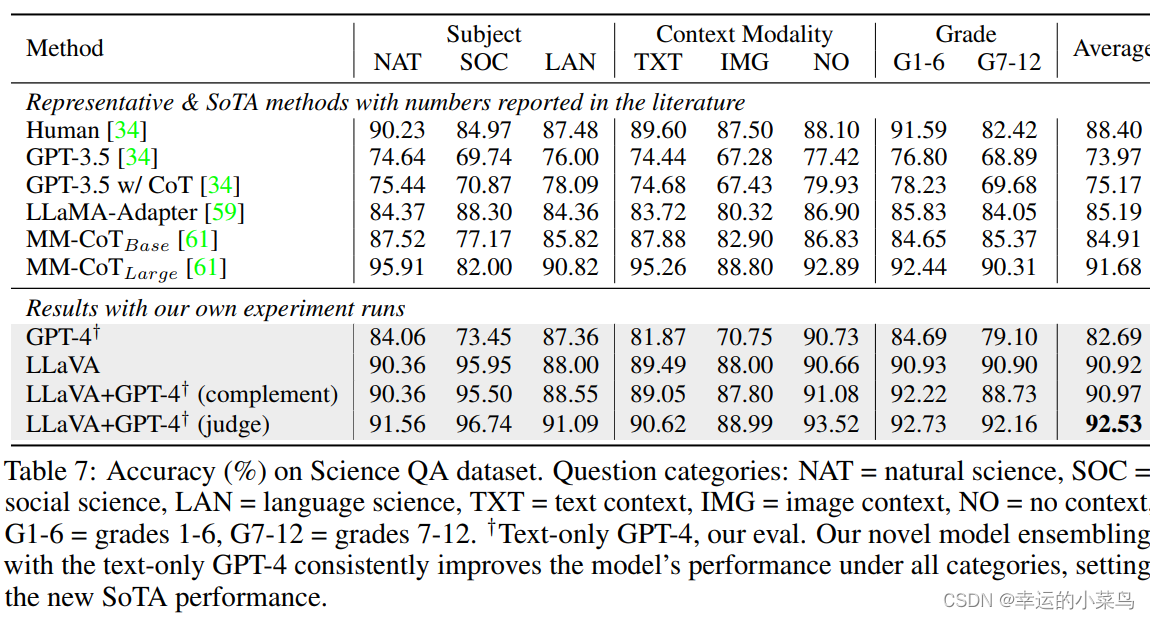
ScienceQA包含21k个多模态选择题,具有丰富的领域多样性,涉及3个学科、26个主题、127个类别和379个技能。基准数据集分为训练、验证和测试部分,分别有12726、4241和4241个示例。我们考虑了两种具有代表性的方法,包括具有和不具有思维链(CoT)的GPT-3.5模型(text- davincici -002)、LLaMA-Adapter以及多模态思维链(MM-CoT),这是该数据集上目前使用的SoTA方法。
对于LLaVA,我们使用最后一层之前的视觉特征,要求模型先预测原因再预测答案,并进行12次epoch的训练。它的准确率为90.92%,与SoTA的91.68%相当接近。为了探索llm的局限性,我们还使用2次上下文学习提示GPT-4,并实现了82.69%的准确率,与GPT-3.5的75.17%相比,这是7.52%的绝对增益。对于大量的问题,我们注意到GPT-4失败仅仅是因为它报告没有足够的背景,如图像或情节。我们考虑了两种方案来结合我们的模型和GPT-4的结果。(i) **GPT-4 complement。**每当GPT-4无法提供答案时,我们就使用我们方法中的预测。该方案的精度为90.97%,与单独应用我们的方法几乎相同。(ii) GPT-4作为裁判。每当GPT-4和LLaVA给出不同的答案时,我们会再次提示GPT-4,要求它根据问题和两个结果提供自己的最终答案。这种精神与CoT相似,但具有来自其他模型的外部知识。令人惊讶的是,该方案能够在所有问题类上提供一致的改进,并达到了92.53%的新的SoTA准确率。有趣的是,不能处理图像的纯文本GPT-4在处理以图像为背景的问题时提高了模型的整体性能。这是因为其中一些问题实际上并不需要图像上下文来给出正确答案。GPT-4judge可以识别这样的情况,并纠正LLaVA犯的一些错误。据我们所知,这是GPT-4首次用于模型集成。我们希望这一发现可以鼓励未来的研究探索更有效的方法来利用MLLMs集成。
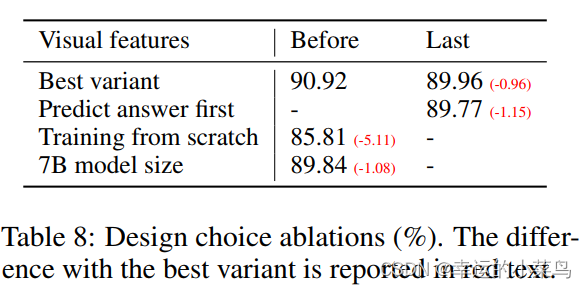
Ablations.我们在表8中列出了ScienceQA上的几个设计选择。(i)视觉特征。我们尝试使用来自CLIP视觉编码器的最后一层特征,其正确率为89.96%,比上一层之前的特征低0.96%。我们假设这是因为CLIP的最后一层特征可能比前一层更关注全局和抽象的图像属性,而前一层更关注有助于理解特定图像细节的局部属性。(2)的思路。为了确定模型预测中答案和推理过程之间的顺序,我们运行了两个变量,观察到答案优先在12个epoch中报告了最好的89.77%准确率,而推理优先在6个epoch中可以快速达到89.77%准确率,但随着训练的增加并没有进一步提高。训练模型24次并不能提高性能。我们得出结论,类COT推理优先策略可以在很大程度上提高收敛性,但对最终性能的贡献相对较小。(3)预训练。我们跳过预训练,直接在Science QA上从头开始训练——性能下降到85.81%的准确率。5.11%的绝对退化表明我们的预训练阶段的重要性,在对齐多模态特征的同时保留大量的预训练知识。(iv)模型大小。我们保持所有配置与我们最好的13B模型相同,并训练一个7B模型。准确率为89.84%,比90.92%低1.08%,说明模型尺度的重要性。
6 Conclusion
本文论证了视觉指令调优的有效性。我们提出了一个自动管道来创建语言图像指令跟随数据,并在此基础上训练多模态模型LLaVA来跟随人类意图完成视觉任务。当在ScienceQA上进行微调时,它达到了新的SoTA精度,当在多模态聊天数据上进行微调时,它具有出色的视觉聊天功能。此外,**我们提出了第一个研究多模态指令跟随能力的基准。**本文是视觉教学调优的第一步,主要关注现实生活中的任务。

