
- 1【HarmonyOS 4.0 应用开发实战】ArkTS 快速入门
- 2java swing 开发手册_解读阿里巴巴 Java 开发手册背后的思考
- 315种数据分析方法和模型,赶紧收藏!_数据分析模型
- 4程序员带你解析Web是什么
- 5windows server 2016的安装及基础操作_server2016安装完以后变成dos版
- 6使用镜像源下载Hugging Face模型_hugging face 国内镜像
- 7近50年数据库技术发展史_叙述数据库技术50年发展取得的主要成就
- 8nginx 有哪些功能_nginx有什么功能
- 9麒麟系统防火墙配置方法_银河麒麟操作系统最佳安全配置
- 10三次样条插值(Cubic Spline Interpolation)及代码实现(C语言)
poseC3D代码结构
赞
踩
说明:虽然代码看着很多,其实只有三部分:1. 配置文件 2. 工具包 3. 训练器
一. 配置文件--config
说明网络的框架,文件名以主干网络为主
1. C3D 2. slowonly 3. x3d
下图以C3D中的C3D_light_ntu60为例
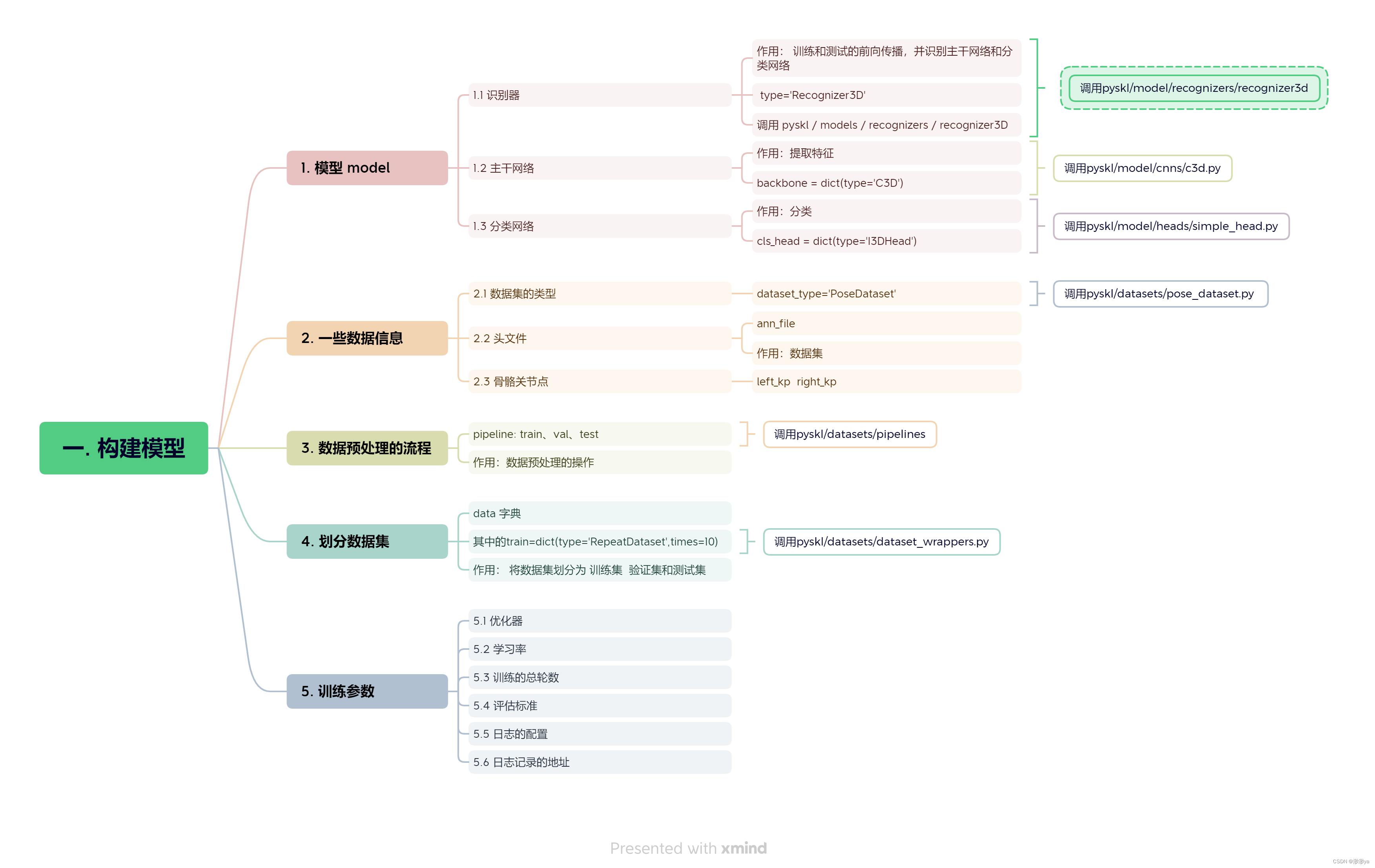
说明:ann_file 下载在 tool/data/data_doc中查找链接
二. 工具包--pyskl
1. models: 被 config/joint.py 调用
2. dataset:
(1) base.py pose_dataset.py video_dataset.py: 说明数据集的类型,是把视频转化为图片,还是直接对视频进行处理
(2)datasets/pipeline: 数据预处理部分
(3)datasets/data_wrappers.py: 重复数据集的长度,个人理解为成倍数的扩大训练的轮数,因为 在joint.py中 total_epoches=24,在data=dic(time=10),官方提供的model zoo中写道训练240轮次
说明:只要在config/joint.py中调用的,都有build.py 因为joint是以字典的形式,在调用时要把调用的类放到容器中 (个人理解)
3. 剩下的 apis core utils在tools/train.py调用
三. 训练器--tool/train.py or test.py
1. 调用pyskl/apis/train.py
2. 在apis/train.py中的数据加载和模型加载中都使用了分布式训练
(1)数据加载器的相关设置中,dataloader_setting=dict(video_per_gpu等),调用了build_dataloader
(2)模型加载中,model=MMDistributedDataParallel()


