
热门标签
热门文章
- 1惹人的应聘简历/邮件是怎样的
- 2Nacos开启鉴权后读取不到配置文件,get data from Nacos error,dataId:http error, code=403,dataId=
- 3“丧心病狂”的C语言小程序,拿去恶搞好友
- 4【特纳斯电子】基于STM32的儿童智能手环-实物设计
- 5关于我司在上海物联网行业协会展厅展示项目案例
- 6大数据相关开源项目汇总_数据分析开源项目
- 7Navicat Premium操作MySQL数据库---执行sql语句
- 8STM32--ESP8266物联网WIFI模块(贝壳物联)--远程无线控制点灯_esp8266怎么与c8t6接线
- 9设备GDB调试_gdb打印指针内容
- 10pm2配置开机自启动 linux和windows系统_pm2 startup windows
当前位置: article > 正文
欧拉角科普介绍 Roll Pitch Yaw_pitch roll yaw
作者:羊村懒王 | 2024-04-11 10:02:02
赞
踩
pitch roll yaw
(转载)
1.欧拉角是什么
来自百度百科:“欧拉角是用来唯一地确定定点转动刚体位置的三个一组独立角参量,由章动角θ、进动角ψ和自转角φ组成,为L.欧拉首先提出,故得名。它们有多种取法,下面是常见的一种”
三个角分别是Yaw,Pitch,Roll。可以这样简单的理解:Yaw 表示绕Z轴的偏航角度,Pitch表示绕X轴旋转的俯仰角度,Roll表示绕Y轴旋转的纵向翻滚角度。也就是说,任意的旋转角度都可以通过这三次按照先后顺序旋转得到。矩阵很难让人具体形象表示,欧拉角就容易多了。注意可能很多地方三个角的先后次序不一样。可以借用在飞机飞行中的三个概念来理解欧拉角。如:Yaw(可以用“左右转向的偏角”理解),Pitch(可以用“俯仰的角度”理解),Roll(可以用“自旋”“滚动”理解) ,窃了三张图来更象形地表示下:
2.欧拉角中的旋转
看看就行,以理解为主,想要彻底搞明白,还是要看课本的讲解以及公式推导!!!
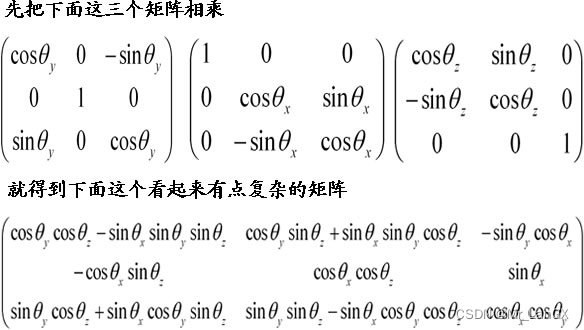
还记得这三个矩阵吗?绕相关轴旋转,乘以相关矩阵就行了,也就是说欧拉角最终还是转换成矩阵相乘,不过是要与三个矩阵相乘
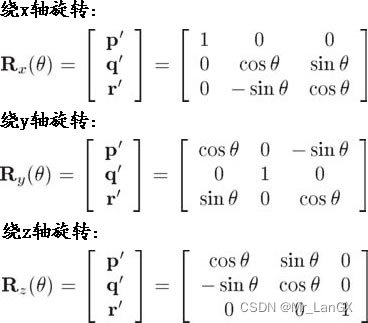
我们知道可以先把这三个矩阵相乘,这样可以节约计算量。就是要先计算这三个矩阵相乘,注意矩阵相乘次序是不可更改的,更改了结果就不一样了。欧拉角的三个角,可以转变为矩阵与矩阵的相乘。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/羊村懒王/article/detail/404320
推荐阅读
相关标签

