
热门标签
热门文章
- 1小迪安全 第59天 服务攻防-中间件安全&CVE 复现&IIS&Apache&Tomcat&Nginx_小迪安全第59天
- 2【300套】基于Springboot+Vue的Java实战开发项目(附源码+演示视频+LW)
- 3git报错 error: cannot lock ref ‘refs/remotes/origin/master‘: unable to resolve reference ‘refs/remote
- 4使用微信小程序连接到 MQTT 云服务_微信小程序mqtt
- 5Adb windows脚本_adb 脚本宏
- 6在Gazebo中如何拯救翻车的机器人
- 7关于txt导入Excel
- 8python爬虫_selenuim登录个人markdown博客站点_nxjlfvl
- 9STM32内部flash闪存的总结_stm32 flash存储
- 10【毕业季】图匮于丰,防俭于逸;治不忘乱,安不忘危,高级前端开发面试解答之线程篇
当前位置: article > 正文
机器人学习--pitch yaw roll_roll pitch yaw
作者:2023面试高手 | 2024-04-13 10:25:21
赞
踩
roll pitch yaw
三维空间的右手笛卡尔坐标如图
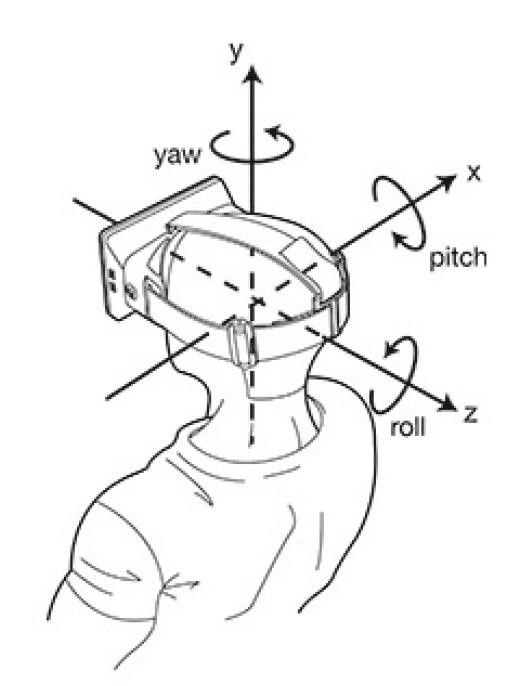
在航空中,pitch, yaw, roll如图2所示。
pitch是围绕X轴旋转,也叫做俯仰角,如图3所示。
yaw是围绕Y轴旋转,也叫偏航角,如图4所示。
roll是围绕Z轴旋转,也叫翻滚角,如图5所示。

pitch():将物体绕X轴旋转(localRotationX)
yaw():将物体绕Y轴旋转(localRotationY)
roll():将物体绕Z轴旋转(localRotationZ)
* roll:绕x轴
* pitch:绕y轴
* yaw:绕z轴
摄像机的roll,yaw,pitch
手机加速计的roll,yaw,pitch
- roll:绕着垂直于手机屏幕的轴旋转
- yaw:绕着手机的向上方向旋转
- pitch:改变手机的俯仰
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/2023面试高手/article/detail/415867
推荐阅读
相关标签

