
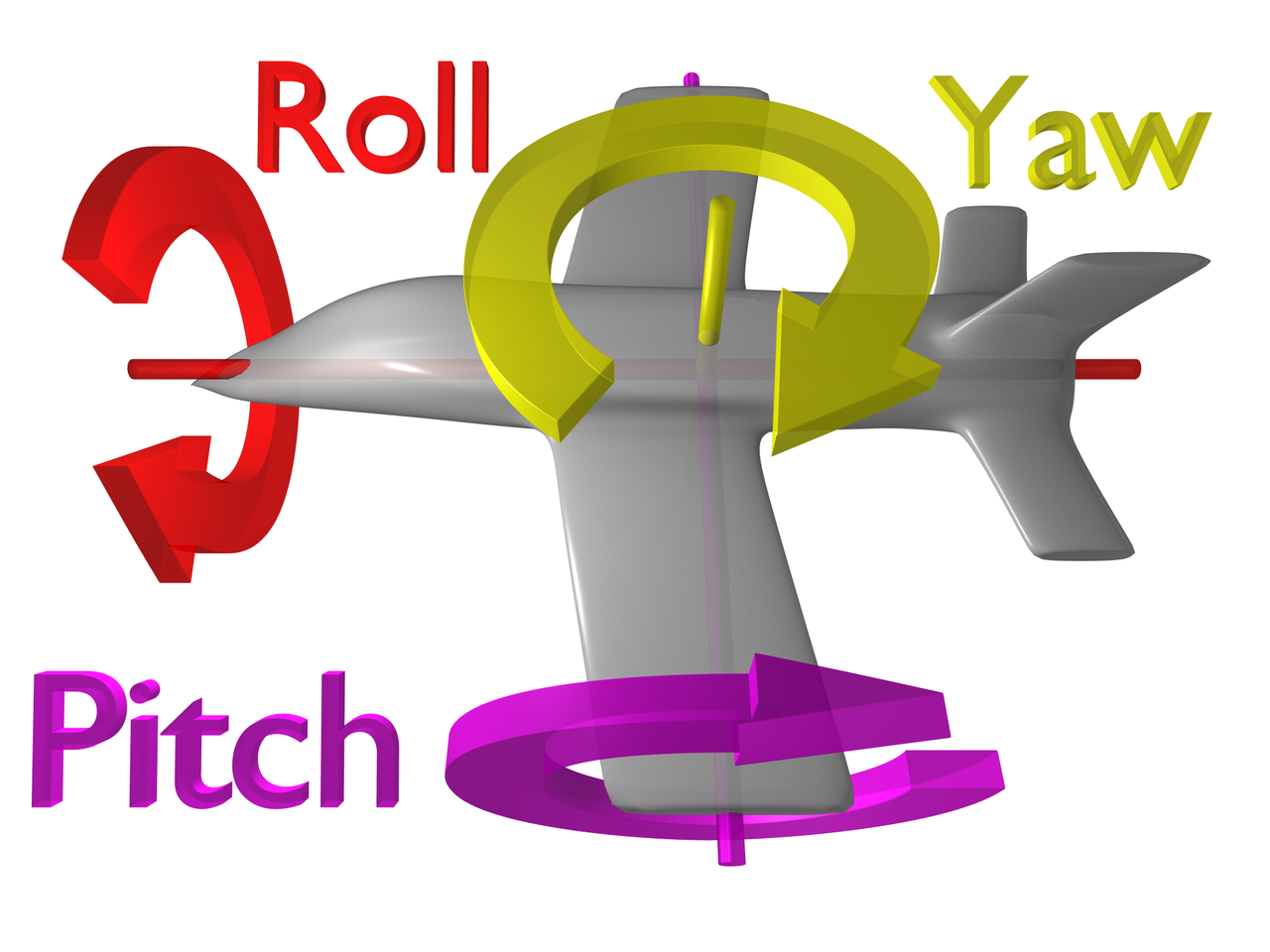
pitch:俯仰角,围绕X轴旋转。机头上抬为正,如下图所示。
yaw:偏航角,围绕Y轴旋转。机头右偏航为正。如下图所示。
roll:翻滚角,围绕Z轴旋转。机体向右滚为正。如下图所示。
参考:
[1] 在机器人行业中我们常说的roll、yaw、pitch是什么
赞
踩
pitch:俯仰角,围绕X轴旋转。机头上抬为正,如下图所示。
yaw:偏航角,围绕Y轴旋转。机头右偏航为正。如下图所示。
roll:翻滚角,围绕Z轴旋转。机体向右滚为正。如下图所示。
参考:
[1] 在机器人行业中我们常说的roll、yaw、pitch是什么
转载于:https://www.cnblogs.com/hao-qiang/p/10019325.html
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

