
热门标签
热门文章
- 1强推5款办公工具,网页版免下载,拿来即用_好用的网页版软件
- 2windows sql server 如何卸载干净?_sql server卸载
- 3MATLAB计算投资组合的cVaR和VaR
- 4Aurora 和 ChipToChip IP(一)_aurora ip核
- 5【头歌-Python】Python第五章作业(初级)(1~6)_python头歌程序设计基础第五章答案
- 6【SpringBoot】从入门到精通的快速开发指南_spring boot从入门到精通
- 7【Docker】Docker的确保环境安全,Docker部署安全性,Sandbox,PaaS,Open Solution,Open Solution,Docker Datacenter的详解_在docker中部署 安全性
- 8数据库系统概念第七版(Database System Concepts 7th)课后习题答案英文版_数据库系统概念第七版课后答案
- 9基于Android Studio 实现计算器(简单易上手使用技术多)_安卓studio计算器
- 10数据结构9 - 常用的10种算法_数据结构算法
当前位置: article > 正文
roll、pitch、yaw(翻滚、俯仰、偏航)的区别_roll pitch
作者:不正经 | 2024-04-13 10:40:35
赞
踩
roll pitch
绝对正解,一目了然
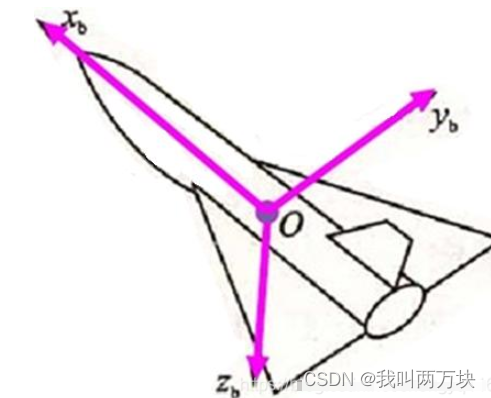
- roll:翻滚角,绕x轴旋转(肉x翻滚,x向前)右滚为正
- pitch:俯仰角,绕y轴旋转(屁y俯仰,y向右)抬头为正
- yaw:偏航角,绕z轴旋转(药z偏航,z向下)右偏航为正
角度即为旋转的度数,从原点往外看,顺时针旋转为正。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/不正经/article/detail/415953
推荐阅读
相关标签

