
热门标签
热门文章
- 1python简单小游戏代码100行,python小游戏程序源代码_python直接可以使用的程序
- 2虚幻引擎 4.14 版发布!_66damf
- 3溢出的文字省略号显示 css_css溢出显示省略号
- 4手写数据集非线性最小二乘二分类实现_最小二乘数据集
- 5深度学习基础——GAN生成对抗网络
- 6Kafka的Rebalance机制_kafka rebalance
- 7CentOS7安装NVIDIA驱动、cuda、cudnn、TensorFlow(未填坑)_错误:软件包:3:nvidia-driver-latest-cuda-460.106.00-1.el
- 8基于JAVA,SpringBoot,Vue,UniAPP外卖订餐点餐小程序设计
- 9前端|Day4:CSS进阶(黑马笔记)
- 10使用Dreambooth LoRA微调SDXL 0.9_适合sdxl的推理框架
当前位置: article > 正文
Python opencv进行圆形识别(圆检测)_opencv识别圆形
作者:Cpp五条 | 2024-02-18 03:17:30
赞
踩
opencv识别圆形
圆形识别(圆检测)是图像识别中很常见的一种处理方式,最核心的是cv2.HoughCircles这个函数实现的圆形检测。当然还有一些其他的处理过程,以下详述:
1 读入图像
首先需要读取一个图像文件,将其作为一个变量
img = cv2.imread("save1.jpg", 0) # 0或者cv2.IMREAD_GRAYSCALE 读取为灰度图像
img2 = cv2.imread("save1.jpg", 1) # 1或者cv2.IMREAD_COLOR 读取为为彩色图像
- 1
- 2
img是一个ndarray,2维结构,包含的是灰度化后的图像信息
img2是一个ndarray,3维结构,包含的是RGB彩色图像信息,比img2多出一个色彩维度
如下图,img2是3个方括号“[”

2 图像预处理
可以对图像进行裁切,滤波等处理,当然不处理也可以直接用,以下展示一下:
裁切
size = 400
x1 = 560
y1 = 200
x2 = x1+size
y2 = y1+size
cut = img[y1:y2, x1:x2]
- 1
- 2
- 3
- 4
- 5
- 6
滤波加二值化
numpy_img = cv2.adaptiveThreshold(cut, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 11, 15) # 自动阈值二值化
- 1
显示中间处理过程
有时候我们需要直观的看到中间处理过程的图像样貌,可以随时显示
cv2.imshow("img", img)
cv2.imshow("cut", cut)
cv2.imshow("numpy_img", numpy_img)
cv2.waitKey(0)
- 1
- 2
- 3
- 4
注意imshow函数,第一个参数是要显示的窗口的标题,不得用中文和中文标点,必须全英文,否则会乱码,第2个参数是待显示的图像变量
最后一行可以没有,如果有的话,程序会在此等待,直到有按键动作,程序才继续往后运行。这对我们调试比较有用。
3 圆形识别
# 圆心距 canny阈值 投票数 最小半径 最大半径
circles = cv2.HoughCircles(img, cv2.HOUGH_GRADIENT, 1, 170, param1=100, param2=60, minRadius=60, maxRadius=90)
- 1
- 2
大概讲一下重要的几个参数,参数与实际的图像尺寸相关,不是一个参数用所有的图
圆心距:170 圆心距小于此值的圆不检测,以减小计算量
canny阈值:图像二值化的参数,根据实际情况调整
投票数:一个圆需要至少包含多少个点,才认为这是一个圆
最小半径,最大半径:在此值之间的圆才是需要的圆,超过范围不检测,以减小计算量
检测完的结果保存在circles 中
可以自己调整参数以观察结果
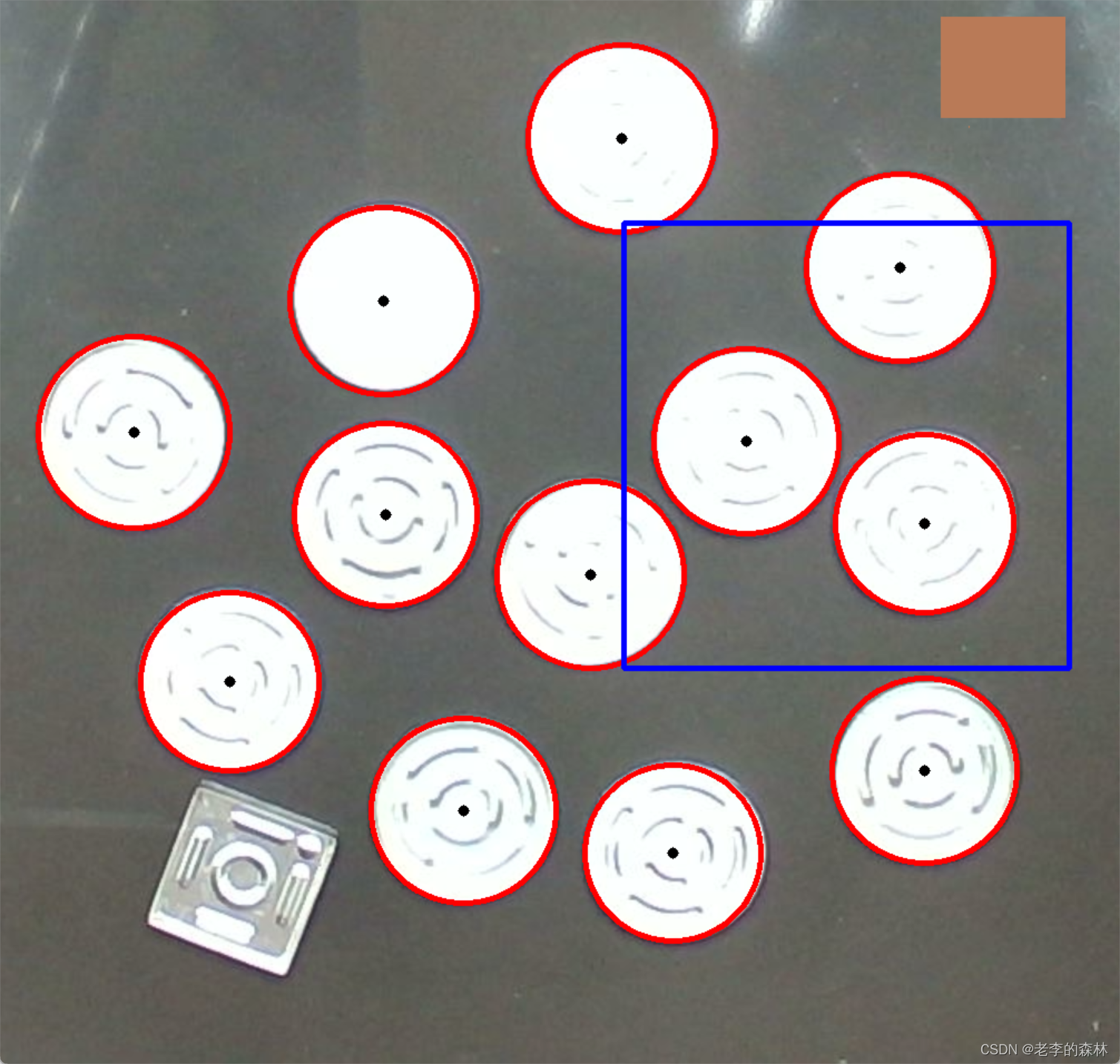
4 显示检测结果
没啥好说的,代码很简单,就是对于每个结果画出圆和圆心
arr1 = np.zeros([0, 2], dtype=int) # 创建一个0行, 2列的空数组
if circles is not None:
circles = np.uint16(np.around(circles)) # 4舍5入, 然后转为uint16
for i in circles[0, :]:
arr1 = np.append(arr1, (i[0], i[1])) # arr1是圆心坐标的np数组
# print(arr1)
cv2.circle(img2, (i[0], i[1]), i[2], (0, 0, 255), 3) # 轮廓
cv2.circle(img2, (i[0], i[1]), 2, (0, 0, 0), 6) # 圆心
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
5 完整代码和示例图像
可以在这里下载:示例代码下载
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Cpp五条/article/detail/104185
推荐阅读
相关标签

