
热门标签
热门文章
- 1Java开发Twitter爬虫抓取图片和视频并保存到本地_java 获取 twitter视频
- 22023mathorcup大数据数学建模竞赛A题完整论文讲解_2023 mathorcup a题 大数据竞赛优秀论文
- 3我的世界Java服务器联机报错_我的世界服务器重启方法一览 如何重启服务器
- 4easyExcel设置行隐藏,解决setHidden(true)失效问题_easyexcel隐藏列
- 5ueditor编辑器 字数统计 不算空格 以及 过滤粘贴板格式_miniui里ueditor插入的表格会占字数吗
- 6Python报错:PermissionError: [Errno 13] Permission denied解决方案详解_permissionerror: [errno 13] permission denied:
- 7python3的pip3离线安装依赖库*.whl_pip3 install whl
- 8密码学原理与实践——流密码和分组密码概要_密钥字长为m的维吉尼亚密码可看作是周期为_的流密码。
- 9python逻辑回归aic_机器学习算法介绍(附上R和python程序)-第二期
- 10数据通信系统的基本模型_数据通信系统组成图
当前位置: article > 正文
OpenCV学习之世界坐标系、相机坐标系、图像坐标系和像素坐标系之间的转换关系_图像和点云标定参数
作者:不正经 | 2024-02-20 11:43:24
赞
踩
图像和点云标定参数
一、各坐标系介绍
图像处理、立体视觉经常涉及到世界坐标系、相机坐标系、图像坐标系和像素坐标系。
如下图所示:

世界坐标系是为了确定相机的位置,在双目视觉中一般将世界坐标系原点定在左相机、右相机
或两者X轴方向的中点。
下面是各坐标系之间的装换,换而言之,就是一个现实中的物体是如何在图像中成像的。
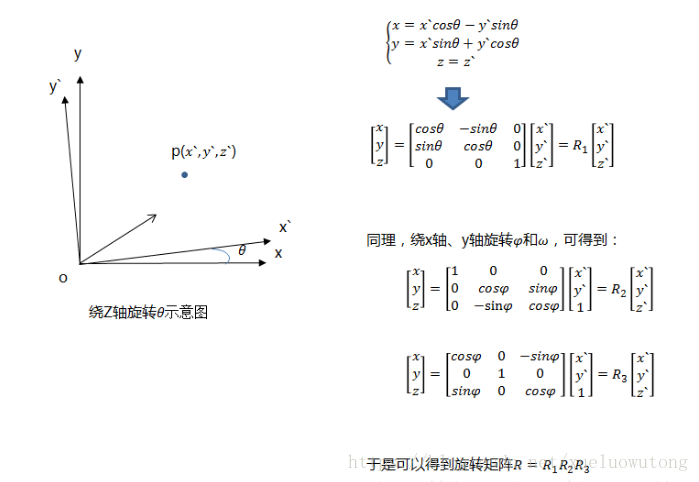
二、世界坐标系和相机坐标系之间的转换

从世界坐标系到相机坐标系,设计到物体的旋转和平移。绕着不同的坐标轴旋转不同的角度,
得到相应的旋转矩阵。如下图所示:
推荐阅读
相关标签

