
热门标签
热门文章
- 1【EI会议征稿通知】2024年软件自动化与程序分析国际学术会议(SAPA 2024)
- 2【云计算】相关解决方案介绍
- 3CSS :has() 能解决什么问题?
- 4Ubuntu14.04安装 ROS 安装步骤和问题总结
- 5flutter更新后[VERBOSE-2:FlutterDarwinContextMetalImpeller.mm(35)] Using the Impeller rendering backend,_[error:flutter/shell/platform/darwin/graphics/flut
- 627K测试老鸟分享自己6年面试心得,四种公司、四种问题…_苏州思源科安面试经验
- 7小程序报错:Failed to load local image resource /pages/goods/NaN加载资源失败问题解决_failed to load local image resource /pages/product
- 8【视觉AIGC识别】误差特征、人脸伪造检测、其他类型假图检测
- 9Winsock使用之创建客户端Socket_winsock sock
- 10Android Studio的代码笔记--strings.xml输入空格换行、中英文多语言切换_androidstudio如何strings.xml进行换行
当前位置: article > 正文
2. OpenCV 可视化(Viz)——相机视锥_相机视锥 可视化
作者:不正经 | 2024-02-20 11:51:49
赞
踩
相机视锥 可视化
2. OpenCV 可视化(Viz)——相机视锥
这一节是显示相机视锥及图像,使相机空间位置更加立体。官方文档内容为:
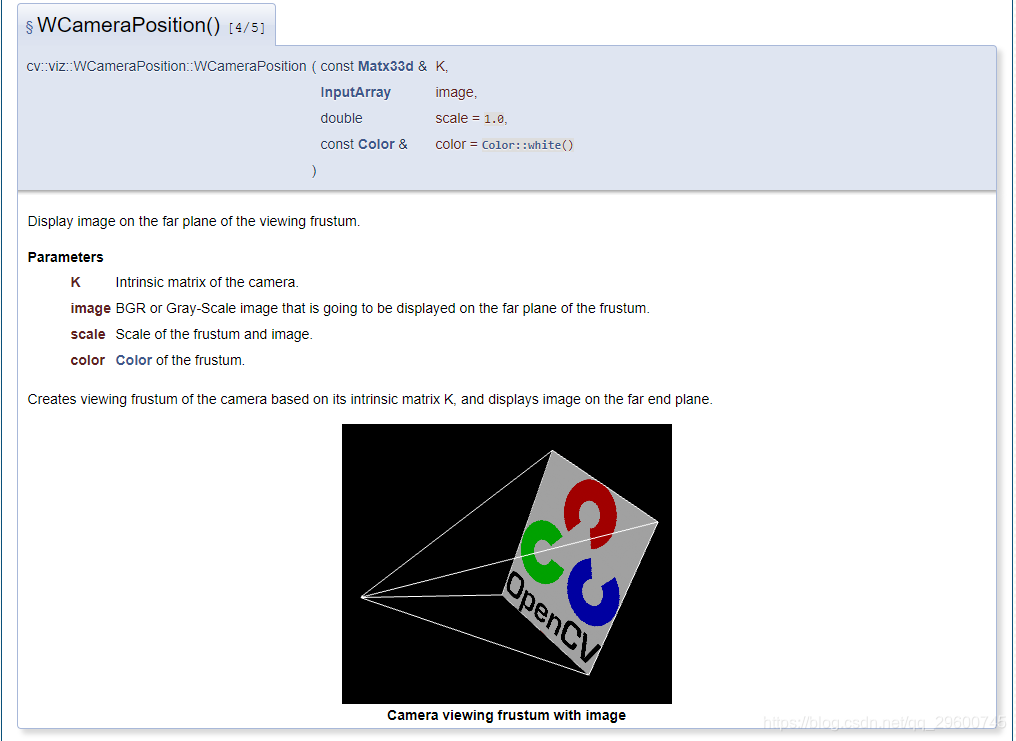
当然,主要的函数就是 WCameraPosition
完成效果:
单个视锥

多个视锥:

程序内容
主程序:
// // Created by zzl on 2020/11/15. // // system #include <iostream> // Eigen 一定要在OpenCV前面 #include "eigen3/Eigen/Core" #include "eigen3/Eigen/Geometry" // OpenCV #include "opencv2/core.hpp" #include "opencv2/imgcodecs.hpp" #include "opencv2/calib3d.hpp" #include "opencv2/viz.hpp" #include "opencv2/core/eigen.hpp" // 要在Eigen 头文件后面 using namespace std; using namespace cv; int main(int argc,char** argv){ //-- 生成窗口 viz::Viz3d mainWindow("Main_Window"); //-- 创建Camera类、设置相机位置 //--- Camera类是计算相机参数的一个类。我们设置一个3x3的内参数,fx = 700 ,fy = 700 ,cx = 320, cy = 240 Matx33f intrisicParams(700.0,0.0,320.0,0.0,700.0,240.0,0.0,0.0,1.0); // 内参矩阵 viz::Camera mainCamera(intrisicParams,Size(640,480)); // 初始化相机类 // --- 导入图像 Mat image = imread("./data/chessboard.png",0); if(image.empty()) return -1; viz::WCameraPosition camParams(mainCamera.getFov(),image,1.0,viz::Color::white()); // 相机参数设置 Affine3f camPosition(Mat::eye(3,3,CV_32F),Vec3f(0,0,0)); //-- 显示 mainWindow.showWidget("Coordinate",viz::WCoordinateSystem(),Affine3f::Identity()); mainWindow.showWidget("Camera",camParams,camPosition); mainWindow.spin(); //-- 以上为单个相机,再加入一个相机 viz::WCameraPosition camParams_2(mainCamera.getFov(),image,1.0,viz::Color::green()); // 2号相机参数设置 Eigen::AngleAxisf rotateVec(-CV_PI / 2,Eigen::Vector3f(0,1,0)); // 涉及绕轴的旋转矩阵的计算,所以引入了Eigen 库 Mat rotationMatrix; eigen2cv(rotateVec.matrix(),rotationMatrix); Affine3f camPosition_2(rotationMatrix,Vec3f(1.5,0,1.5)); mainWindow.showWidget("Coordinate",viz::WCoordinateSystem(),Affine3f::Identity()); mainWindow.showWidget("Camera",camParams,camPosition); mainWindow.showWidget("Camera_2",camParams_2,camPosition_2); mainWindow.spin(); cout<<"Hello World"<<endl; return 0; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
CMakeLists.txt
cmake_minimum_required(VERSION 3.2) project(CylinderDisplay) set(CMAKE_PREFIX_PATH "/home/zzl/opencv420/build/install/") // 我装了两个OpenCV版本 find_package(OpenCV 4 REQUIRED) message(STATUS "OpenCV library status:") message(STATUS " OpenCV Version: ${OpenCV_VERSION}" ) find_package(Pangolin) find_package(Eigen3) set(CMAKE_CXX_STANDARD 17) include_directories(${OpenCV_INCLUDE_DIRS}) include_directories(${EIGEN3_INCLUDE_DIR}) add_executable(Blog cylinderBlog.cpp) target_link_libraries(Blog ${OpenCV_LIBS} )
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
如果遇到平移向量不更新,可以尝试更换OpenCV版本(OpenCV3.4.2 + VTK7.1.1 有这个Bug,我更换到OpenCV 3.4.0 或者 OpenCV 4.2.0解决问题)
目前我使用 OpenCV 4.2.0 + VTK 7.1.1 一切正常
下一步博客更新计划:构造一个虚拟的标定环境,用虚拟相机采集图像,然后执行单目标定~
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/不正经/article/detail/119741
推荐阅读
相关标签

