
- 1自己搭建mqtt服务器_mqtt服务器搭建
- 2pytorch的索引常见方式_torch索引负一负二
- 3一文搞懂TensorFlow和Keras安装_tensorflow.keras
- 4基于FFmpeg进行rtsp推流及拉流(详细教程)_ffmpeg rtsp推流
- 5tensorflow ---gpu的环境配置_tensorflow配置gpu环境
- 6python 进程池(multiprocessing.Pool)和线程池(threadpool.ThreadPool)的区别与实例_multiprocessing.pool.threadpool
- 7百亿级并发系统设计:阿里P8整理的实战教程,助你技术飞跃_阿里p8技术
- 8多线程之pthread_create()函数_pthread_create函数执行后,并没有返回新线程的pid
- 9简单明了的二进制移位运算符‘’<<‘’和‘’>>‘’用法_二进制 >>
- 10解决:如何利用ssh命令,免密登录远程服务器_ssh命令行登录服务器
C++ opencv viz位姿可视化
赞
踩
相对位姿的一种表示方法是刚体变换(旋转矩阵和平移向量)。在做位姿估计或三维重建相关任务时,为了更直观的理解和判断算法的过程和结果,需要把相对位姿可视化。博主了解和学习了两种位姿可视化方法,分别是调用matlab showExtrinsic函数和调用opencv viz模块(需要编译VTK库)。
目录
1.opencv viz模块编译(联合编译contrib和vtk)
1.opencv viz模块编译(联合编译contrib和vtk)
首先下载opencv4.x及其对应的contrib模块(建议用opencv4以上,其viz模块在contrib模块中)。然后下载vtk库。博主vtk库是用vcpkg一键下载的,但是后续联合编译遇到了很多bug,应该是博主对cmake和vcpkg使用还不熟练。在vcpkg安装路径下shift和右键打开powershell。键入 vcpkg install VTK:x64-windows --recurse 。这里从官网vtk下载和cmake编译是一样。编译好vtk后,编译opencv cotrib viz。用cmake编译,主要注意三个点:
1.with_VTK一定要勾选 2.build_viz一定要勾选 3.OPENCV_EXTRA_MODULES_PATH选择contrib源码下module所在的路径。
生成解决方案后,检查modules下有没有viz模块,有就可以进行最后一步生成库了;如果没有说明前面3步出了问题,重新configure一下

2.相对位姿表示
用刚体变换(旋转矩阵和平移向量)表示如下;右边X=[X,Y,Z]表示坐标系1下3D点坐标,左边X'=[X',Y',Z']表示同名3D点在坐标系2下的坐标。但是为了可视化两个坐标系间的相对位姿,直接用这里的R和T是不行的。(博主认为,3D点的刚体变换,和可视化坐标系刚体变换是相逆的)
将上式写成等价的其次坐标形式,使得整个变换为乘法形式。
经常我们可以得到上述变换A,但是位姿可视化需要上述的逆变换,也就是inv(A).
3.代码
首先是matlab。博主用之前matlab 张正友标定的相机参数。
showExtrinsics(stereoParams2) 
接下来我们把同样的参数导入到C++ opencv viz模块


- void test()
- {
- cv::Matx33d r;
-
- cv::Vec3d t;
- r <<
- 0.965187427746172, 0.00676895643700972, -0.261471624750146,
- -0.00517875663081780, 0.999963671140472, 0.00677029386577335,
- 0.261507953608463, -0.00518050461094595, 0.965187418365723;
- t << -432.087309575979/432, - 9.19798126882100 / 432, 39.9247425340855 / 432;
- r = r.t();
- cv::viz::Viz3d myWindow("Coordinate Frame");
- cv::Vec3d cam1_pose(0, 0, 0), cam1_focalPoint(0, 0, 1000), cam1_y_dir(0, 1, 0);
- cv::Affine3d cam_init_pose = cv::viz::makeCameraPose(cam1_pose, cam1_focalPoint,
- cam1_y_dir);
- myWindow.showWidget("World_coordinate", cv::viz::WCoordinateSystem(),
- cam_init_pose);
-
-
- cv::Affine3d transpose1(r, t);
- transpose1 = transpose1.inv();
- myWindow.showWidget("Cam0", cv::viz::WCoordinateSystem(), transpose1);
- myWindow.spin();
- }

这里需要主要r=r.t()是因为matlab双目标定工具箱中获取旋转矩阵是从2相机到1相机下的R,转置后才是从1到2的R。以及最后transpose1.inv()是之前提到的将变换取逆变才是要可视化的坐标系变换。
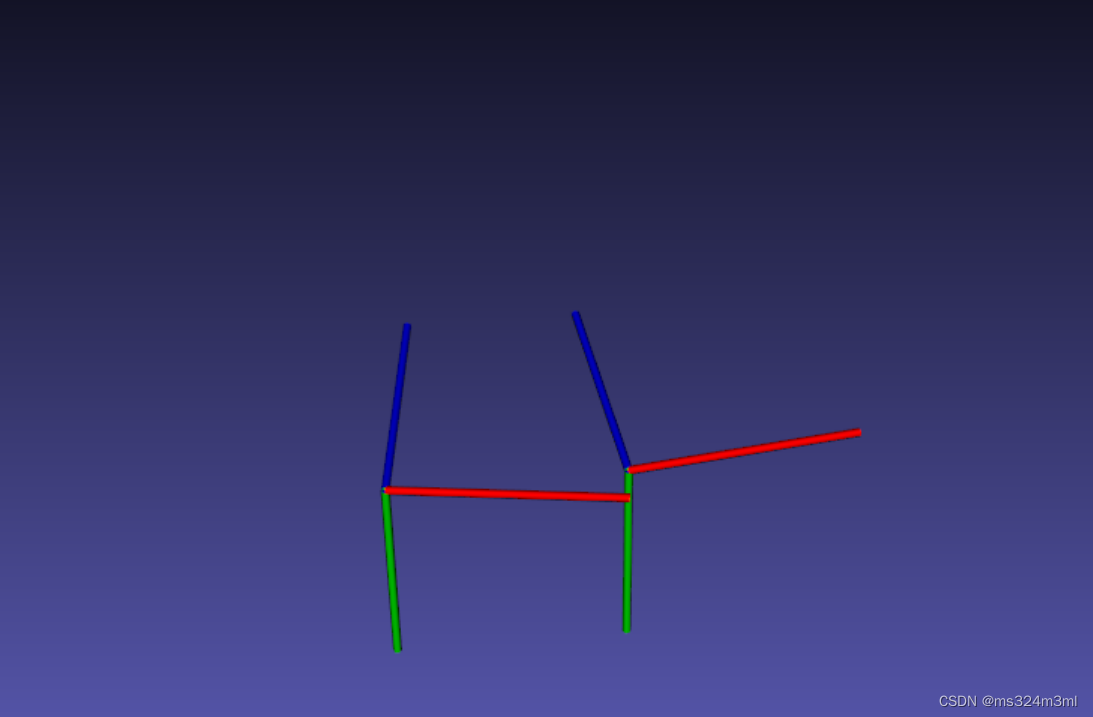
最后得到的可视化结果,rgb分别表示xyz轴(viz自带设定),这样看,和上面matlab的外参显示相同。至此,用C++ opencv viz成功将获得的刚体变换可视化出来了。

