
- 1udhcpd简单配置_udhcpd 配置
- 2堆的数据结构以及堆的相应操作
- 3无线通信基本原理_无线通信原理
- 4访问CentOS7光盘_centos7怎么打开光盘命令
- 5《UE5_C++多人TPS完整教程》学习笔记2 ——《P3 多人游戏概念(Multiplayer Concept)》
- 6chatgpt赋能python:用Python进行股票分析_用chatgpt写股票分析报告
- 7机器学习笔记 - 深度学习在网球运动分析上的应用_ibm slamtracker
- 8vue3 中Element Plus的el-select 样式(包括更换小图标样式)_vue
- 9使用python实现跨年烟花代码_python跨年代码
- 10大语言模型介绍(一)
matlab机械臂运动(2)_matlab机械臂控制仿真
赞
踩
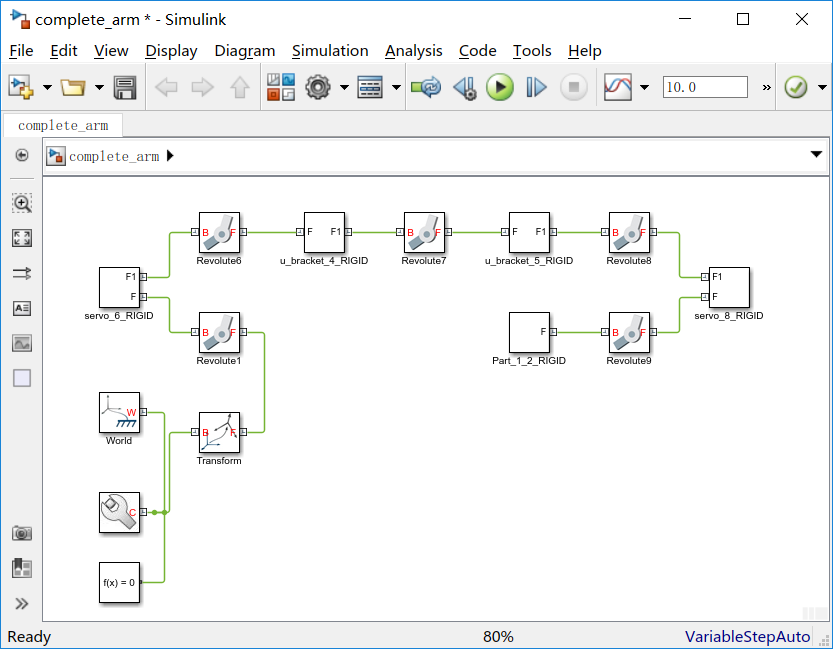
1、上接从Onshape下载机械臂到MATLAB中和双摆运动演示。这里对导入的机械臂CAD模型(complete_arm.slx)进行运动的实现。方法如双摆运动演示一样:对关节部分施加驱动信号--- Actuation > Motion------Provided by Input。
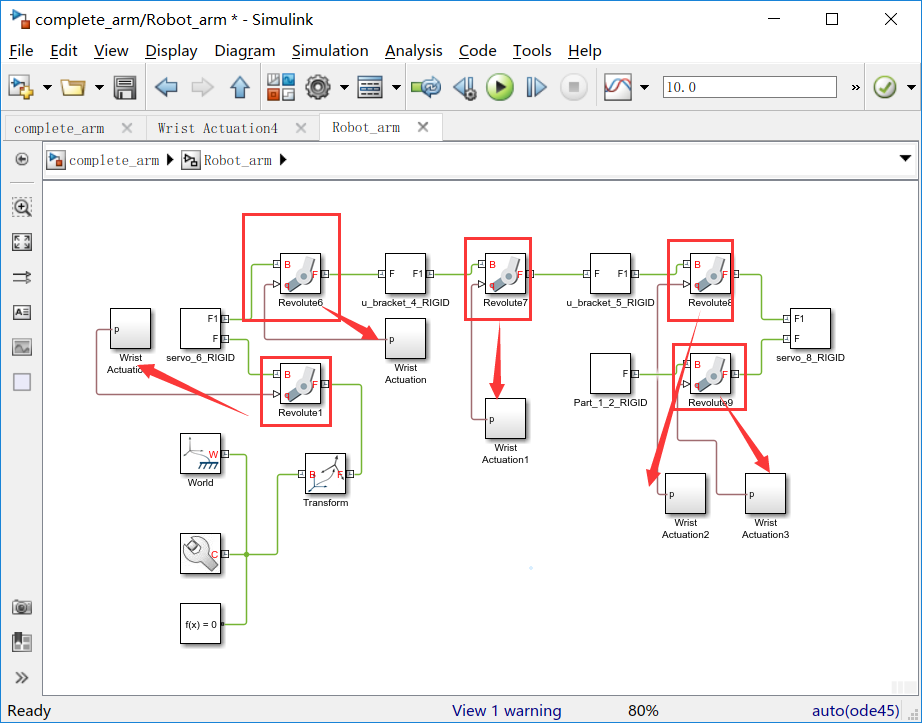
------------------首先打开complete_arm.slx-(可以从simulink最近打开里找,也可以从你保存的路径下找)---------------------
2、对Revolute1/6/7/8/9进行修改,双击打开。如下Revolute1,其他6/7/8/9的Actuation设置与Revolute1一样,只是初始位置的设置不一样-----即Specify Position Target的Value值就是机械臂的最开始的角度值。
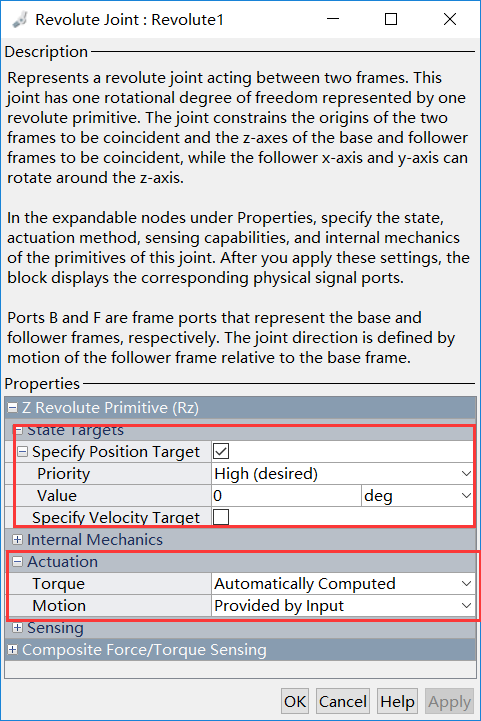
3、完成之后加入Actuation Motion的驱动,即加入Provided by input是谁提供的。
在simulink library browser中 输入 signal builder 
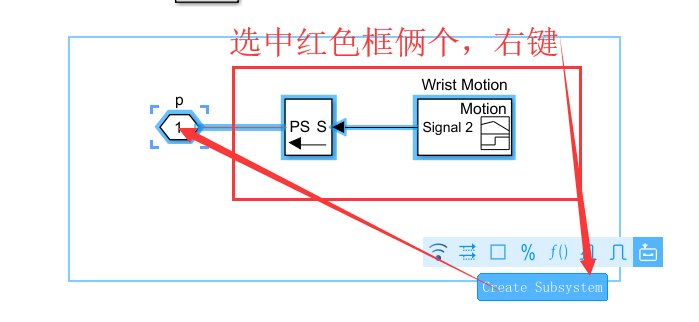
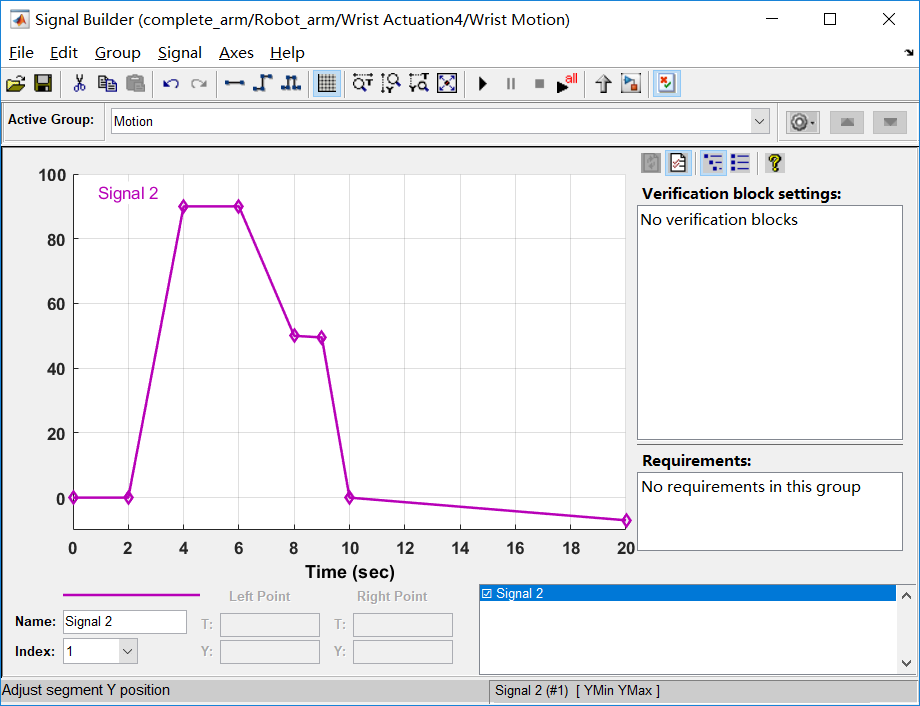
4、每个关节的Motion信号(signal builder)可修改,将子系统复制粘贴与关节数一样,如下布局连接。
5、点击运行,视觉切换到方便观察位置。

6、小结
如上是给每个关节以驱动信号,这样的运动方式属于机械臂正运动。所以可以尝试只给末端位置信号,逆解去完成各关节如何运动。
更多详细,可以在MATLAB的simulink案例中学习。需要这次这个模型的可以在我上传的资源中下载https://download.csdn.net/download/weixin_39090239/10456328(简单运动,),要免费下载的也可以私我。。。也不晓得有没有,先这样吧
福利资源:MATLAB机械臂简单控制仿真(Simulink篇-总)资源-CSDN文库(升级版)


