
- 1金融统计分析与挖掘实战8.3-8.4_基于总体规模与投资效率指标的综合评价法python
- 2云服务器做深度学习推荐+autoDL云服务器进行深度学习教程_autodl 飞浆
- 3阿里云---阿里云服务器ECS开放8080端口_阿里云服务器开放8080端口
- 4如何把要想保存的文章转为 Markdown 格式
- 5ElasticSearch高可用安装部署(Linux)_elasticsearch高可用部署
- 6开源软件许可证知识产权问题_开源软件许可的“后台”和“前台”知识产权。
- 7Linux自学笔记——Centos系统安装
- 8开源中国众包平台的个人空间 工作日志 正文 关于你对软件众包的误解,你真的错了。_开源众包操作手册
- 9【golang】25、图片操作
- 10认识Node.js和基础三大模块_urfs
opencv的相机校准和3D建模的理论知识_opencv绘制世界坐标系
赞
踩
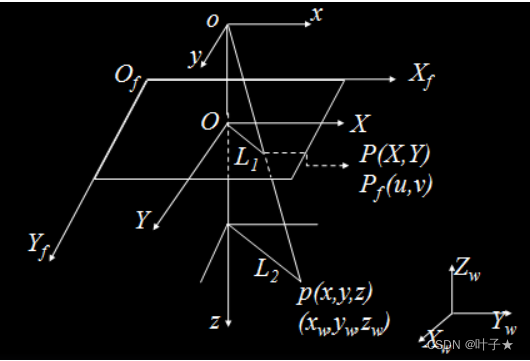
一、相机标定的四个坐标系
1、世界坐标系(Xw,Yw,Zw):也称真实或现实世界坐标系,或全局坐标系。它是客观世界的绝对坐标,由用户任意定义的三维空间坐标系。一般的3D场景都用这个坐标系来表示。
世界坐标系的作用:标定时确定标定物的位置;作为双目视觉参考系,给出两个相机相对世界坐标系的关系,从而求出两个相机之间的关系;作为重建得到三维坐标的容器,盛放重建后的物体的三维坐标。
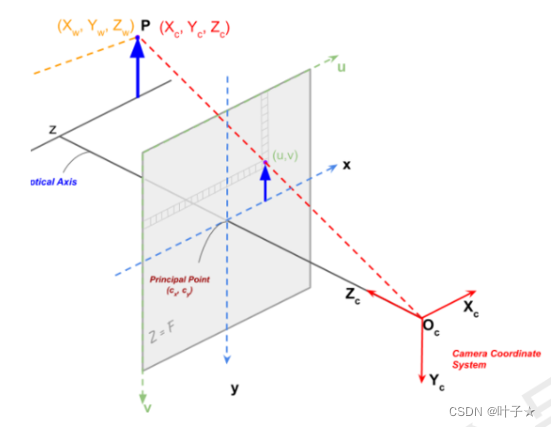
2、摄像机坐标系(Zc,Xc,Yc):摄像坐标系的原点在摄像机的光心上,z轴与摄像机光轴平行,x,y 一般与图像物理坐标系的X,Y平行。
摄像机坐标系的作用:世界坐标系的物体需要先进行刚体变化转变到摄像机坐标系(旋转平移),然后再跟图像坐标系发生关系。
3、图像坐标系:分为图像物理坐标系和图像像素坐标系,以摄像机拍摄的二维图片为基准建立的坐标系,指物体在图片的位置。
图像物理坐标系(x,y):其原点为透镜光轴与成像平面的交点,X 与Y 轴分别平行于摄像机坐标系的x与y 轴,是平面直角坐标系,单位为毫米。(X,Y)代表物体从摄像机坐标系到图像坐标系透视投影关系。
图像像素坐标系(u,v):固定在图像上的以像素为单位的平面直角坐标系,其原点位于图像左上角, Xf,Yf平行于图像物理坐标系的X 和Y轴。对于数字图像,分别为行列方向。(u,v)则是实实在在的,我们能从摄像机得到的真实信息。
图像如下:
立体图:
二、四大坐标系的坐标转换:
1、世界坐标转摄像机坐标:通过外参矩阵:旋转+平移(只要世界坐标和摄像机坐标相对位置关系发生改变,外参也会发生改变)
T是世界坐标系原点在摄像机坐标系中的坐标,矩阵R是正交旋转矩阵

2、摄像机坐标转像素坐标:先进行摄像机转图像物理坐标,再转为图像像素坐标,总结为内参矩阵(只与相机有关)
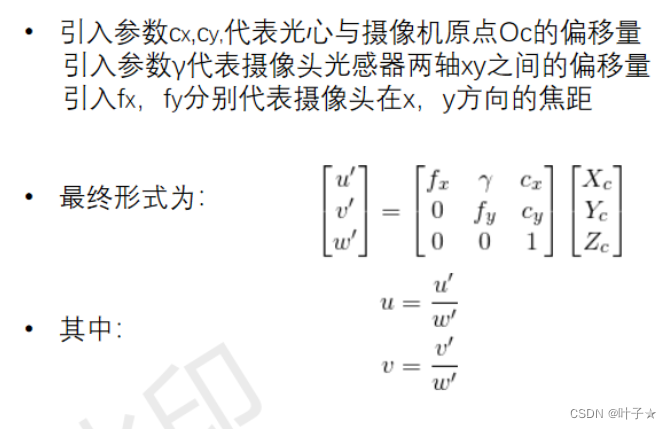
以上转换流程图如下:

三、畸形模式
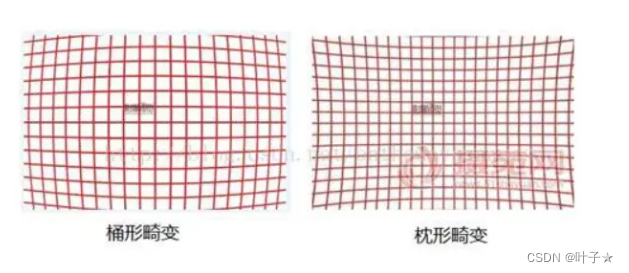
一、径向畸变
对于某些透镜,光线再远离透镜中心的地方比靠近中心的地方更加弯曲,产生'筒型'或者'鱼眼'现象,称为径向畸变。
一般来说,成像仪中心的径向畸变为0,越向近边缘移动,畸形越严重,径向畸变可以通过泰勒级数展示式来校正:
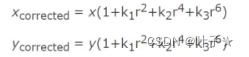
x,y是畸变点在成像仪上的原始位置,r为该点距离成像仪中心的距离,xcorreted,ycorreted是校正后的新位置。(对于一般的摄像机校正,通常使用泰勒级数中的前两项k1和k2就够了,畸变很打的摄像机,比如鱼眼透镜可以使用第三径向畸变项K3)
2、切向畸变
当成像仪被粘贴在摄像机的时候,会存在一定的误差,是平面和透镜不完全平行,从而产生切向畸变,也就是说,如果一个矩形被投影到成像仪上时,可以会变成一个梯形,切向畸变可以通过如下公式校正,x,y,r,xcorreted,ycorreted参数跟以上意义一样
![]()
注意:x,y时图像物理坐标,不是图像像素坐标
图像描述如下:
径向畸变:桶形畸变,枕形畸变 (桶形x,y比实际要大,枕形刚好相反)
切向畸变:

畸变系数:Distortioncoefficients=(k1k2p1p2k3)
要进行畸变矫正,必须知道畸变系数(求内参的目的,就是校正畸变和求外参 ),然后做畸变相反的操作,消除畸变 。
相机标定的最终目的:根据一组已知三维图像的世界坐标,以及不同角度拍摄获取的像素坐标,来计算出内存矩阵和外参矩阵,畸变参数。
标定之后就是消除畸变:由于每个镜头的畸变程度各不相同,通过相机标定可以校正镜头畸变矫正畸变,生成矫正后的图片;另一个是根据获得的图片进行重构三维场景。

