
- 1IDEA里tomcat出现Caused by: java.lang.ClassNotFoundException: org.apache.log4j.Logger的解决办法
- 2机器学习:梯度下降法超详细指南_机器学习 梯度下降
- 3找不到类:Caused by: java.lang.ClassNotFoundException: Cannot find class: BokeDec
- 4C# winform Combox 下拉菜单 DropDownList 下拉选项空白无法显示文本的解决方案_c# winfrom dropdownlist
- 5EEG微状态预测并发fMRI动态功能连接状态_eeg 滑动窗口
- 62023-06-19 Untiy进阶 C#知识补充3——C#1-4主要功能与语法
- 7C# Unity编程终极指南_c#语言做unity
- 8【编程实践】一致性哈希(hash)算法实现_哈希算法 verilog代码 淘宝
- 9【Ubuntu日常技巧】Ubuntu命令行设置系统时区、时间
- 10PyTorch使用Tricks:梯度裁剪-防止梯度爆炸或梯度消失 !!
OpenCV中的边缘检测技术及实现
赞
踩
介绍:
边缘检测是计算机视觉中非常重要的技术之一。它用于有效地识别图像中的边缘和轮廓,对于图像分析和目标检测任务至关重要。OpenCV提供了多种边缘检测技术的实现,本博客将介绍其中的两种常用方法:Canny边缘检测和Sobel边缘检测。
理论介绍:
1. Canny边缘检测:
Canny边缘检测是一种经典的边缘检测算法,它被广泛应用于图像处理领域。该方法结合了多个步骤,包括高斯滤波、计算梯度、非最大值抑制和双阈值处理。首先,通过应用高斯滤波器来平滑图像,以减少噪声的影响。然后,计算图像的梯度,找到像素点的边缘强度和方向。接下来,进行非最大值抑制,通过比较像素点周围的梯度值来细化边缘。最后,通过设置高低阈值来检测真正的边缘。
2. Sobel边缘检测:
Sobel算子是一种基于图像梯度的边缘检测算法,它通过计算像素点的梯度来检测边缘。该算子使用两个3x3的卷积核,分别对图像进行水平和垂直梯度计算。水平梯度可以检测垂直边缘,垂直梯度可以检测水平边缘。通过将水平和垂直梯度的结果进行组合,可以得到图像的整体边缘信息。
程序实现:
python程序代码
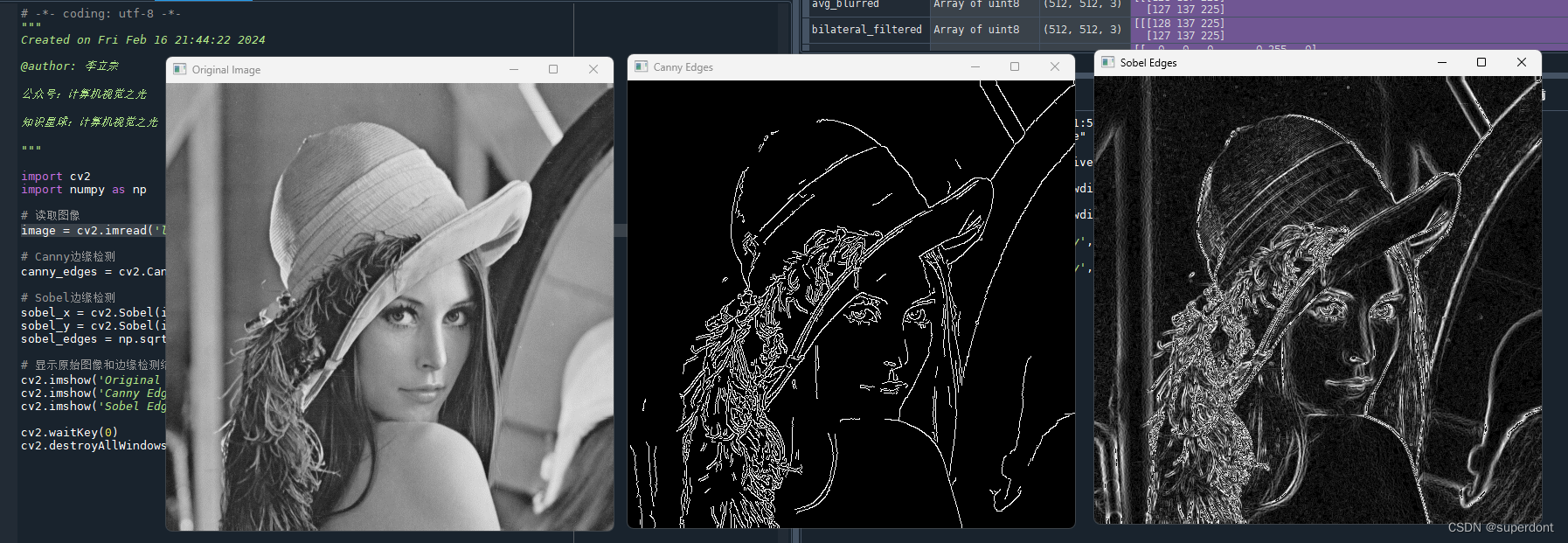
下面是使用Python和OpenCV实现Canny边缘检测和Sobel边缘检测的示例代码:
# -*- coding: utf-8 -*- """ Created on Fri Feb 16 21:44:22 2024 @author: 李立宗 公众号:计算机视觉之光 知识星球:计算机视觉之光 """ import cv2 import numpy as np # 读取图像 image = cv2.imread('lena.bmp', 0) # Canny边缘检测 canny_edges = cv2.Canny(image, 100, 200) # Sobel边缘检测 sobel_x = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=3) sobel_y = cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize=3) sobel_edges = np.sqrt(sobel_x**2 + sobel_y**2).astype(np.uint8) # 显示原始图像和边缘检测结果 cv2.imshow('Original Image', image) cv2.imshow('Canny Edges', canny_edges) cv2.imshow('Sobel Edges', sobel_edges) cv2.waitKey(0) cv2.destroyAllWindows()

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
程序演示
小结
在这个示例中,我们读取了一张灰度图像,并分别使用Canny边缘检测和Sobel边缘检测算法进行了边缘检测。最后,将原始图像和边缘检测结果展示出来。
结论:
边缘检测是计算机视觉中重要的技术之一,用于识别图像中的边缘和轮廓。其中,Canny边缘检测和Sobel边缘检测是常用的方法,它们在OpenCV中都有相应的实现。本博客介绍了这两种方法的理论原理,并给出了使用OpenCV实现边缘检测的示例代码。希望通过本博客的学习,初学者可以对OpenCV中的边缘检测有一个清晰的了解,并将其应用于自己的项目中。
相关知识点
参考文献
1、OpenCV轻松入门
李立宗,OpenCV轻松入门,电子工业出版社,2023
2、计算机视觉40例
李立宗,计算机视觉40例,电子工业出版社,2022


